

서 론
연구자료
신호 탐지 모델
VGG-19
YOLOv11
자료 처리 과정별 신호 탐지 결과
모델 학습 및 학습 모델 적용
VGG-19
YOLO v11
토 의
신호 탐지 성능 정량 평가
기계학습 기반 잡음 제거와 신호 탐지 성능
결 론
서 론
분포형 광섬유 센싱(Distributed Acoustic Sensing, DAS) 시스템은 인테로게이터(interrogator)에서 송신된 레이저 펄스(laser pulse)가 광섬유 케이블을 따라 전파되는 동안 발생하는 레일리 후방산란(Rayleigh back scattering) 신호를 측정하여 외부 진동이나 환경 변화를 감지하는 기술이다. DAS 시스템은 기존 지진계와 달리 광섬유 케이블 전체를 진동 감지 센서로 활용할 수 있어 넓은 영역에 걸쳐 실시간으로 높은 공간해상도를 가지는 연속적인 자료를 취득할 수 있다(Lellouch et al., 2020). 이러한 특성으로 인해 실험을 위한 광섬유 케이블 설치 뿐만 아니라 기존 통신 인프라인 유휴 광섬유(Dark fiber)를 활용한 지진 모니터링 연구가 진행되고 있으며, 미소지진 탐지 분야에서도 주목받고 있다(Parker et al., 2014; Molteni et al., 2017; Nayak et al., 2021; Tribaldos et al., 2021; Xie et al., 2021; Lapins et al., 2024; Yu et al., 2024).
DAS 시스템은 높은 공간해상도의 자료를 연속적으로 취득할 수 있기 때문에 하루에 수 테라바이트에 달하는 방대한 양의 자료를 실시간으로 생성한다(Dong et al., 2022). 예를 들어, 10 km 길이의 광섬유 케이블에서 1 m의 측정 간격과 1000 Hz의 샘플링 주파수로 자료를 취득할 경우, 하루 동안 약 3.5 TB의 데이터가 생성된다. 이러한 대용량 자료를 모두 저장하고 관리하는 것은 비용과 저장 공간 측면에서 비효율적이다. 따라서 취득된 자료 중 유의미한 진동 신호를 실시간으로 감지하고 분류해 필요한 데이터만 선별하여 저장하고 전송하는 시스템 구축이 필수적이다(Chen et al., 2025; Yu et al., 2024). 전통적인 지진 모니터링에서는 지진 신호 탐지를 위해 전문가가 수동으로 지진파 신호를 식별하고 분석해왔다(Lellouch et al., 2021). 그러나 DAS 시스템에서 생성되는 연속적 대용량 자료를 사람이 실시간으로 모니터링하여 미소 지진 이벤트를 탐지하는 것은 현실적으로 어렵다. 특히 미소지진과 같이 진폭이 작고 잡음과 구별하기 어려운 신호의 경우 24시간 연속적인 모니터링이 필요하지만 인력으로는 한계가 있다. 따라서 DAS 시스템을 통해 획득한 자료를 통해 실시간 미소지진 모니터링을 수행하고자 할 경우에는 자동화된 알고리즘을 통한 실시간 신호 탐지 및 분류 기술 개발이 필요하다.
최근 미소지진 이벤트 탐지 분야에서는 STA/LTA (Short-Term Average/Long-Term Average) 비율 분석, 템플릿 매칭(Template matching), 파형 상관 분석 등의 전통적인 기법뿐만 아니라 딥러닝을 포함한 기계학습을 활용한 연구가 활발히 수행되고 있다(Anikiev et al., 2023). 특히 합성곱 신경망(Convolutional Neural Network, CNN)과 그래프 신경망(Graph Neural Network, GNN) 등을 이용한 자동 지진 신호 탐지 및 분류 연구가 주목받고 있다. Lellouch et al. (2021)에서는 미국 유타의 지열발전 시스템(FORGE)에서 수압 파쇄 초기 단계에 DAS 시스템을 통해 미소 지진 이벤트 자료를 취득하였으며, 템플릿 매칭 기법과 수동 분석 및 규칙 기반 신호 처리 기법을 적용하여 지역 지진 관측소에서 탐지한 기록 뿐만 아니라 관측소에서 탐지하지 못한 미소지진까지 성공적으로 탐지하였다. Given et al. (2022)에서는 동일한 FORGE 시스템에서 합성곱 신경망을 활용하여 수압 파쇄 진행 중 및 진행 후의 미소지진 이벤트 탐지를 탐지함으로써 DAS 시스템을 통한 지하 균열의 장기적인 거동을 모니터링 할 수 있음을 확인하였다. Liu et al. (2021)에서는 기존의 STA/LTA와 같은 신호 기반의 탐지 방식의 한계를 극복하기 위해 합성곱 신경망을 이용한 미소지진 신호 자동 탐지 및 분류 모델을 제안하여 기존 방식보다 높은 이벤트 탐지 정확도와 분류 정확도를 달성하였다. Shahabudin et al. (2024)에서는 DAS 자료를 그래프 구조로 표현하여 각 센싱 포인트 간의 관계를 그래프 신경망으로 학습하여 지진 이벤트 발생 시 나타나는 복잡한 파형 패턴을 자동으로 탐지하고 잡음과 실제 이벤트를 효과적으로 구분하였다. 한편, DAS 자료 처리 및 이벤트 탐지의 효율성을 향상시키기 위한 연구도 활발히 진행되고 있다. Huot et al. (2022)에서는 딥러닝 모델을 통해 높은 정확도로 사람이 놓치는 약한 이벤트까지 탐지하여 기존 수작업 대비 많은 이벤트를 탐지할 수 있음을 보였다. Yu et al. (2024)에서는 ResNet 기반의 딥러닝 모델인 DASEventNet을 개발하여 유타 FORGE DAS 자료에서 사람이 탐지하지 못하는 미소지진 이벤트까지 성공적으로 탐지하였다. 이러한 연구 결과들은 DAS 시스템에 기계학습 기법을 적용하여 실시간 미소지진 모니터링의 정확도 및 효율성을 향상시킬 수 있는 가능성을 제시하고 있다.
실시간에 가까운(준실시간) 미소지진 모니터링을 수행하기 위해서는 자료가 취득되고 있는 현장에서 빠르게 적용할 수 있는 효율적인 자료 처리 절차가 선행 되어야한다. 뿐만 아니라 자료 취득 및 전처리와 동시에 효율적인 자료 관리를 위해 신속하게 적용하여 신호를 탐지할 수 있는 경량화된 기계학습 기반의 신호 탐지 모델이 필요하다. DAS 시스템의 연속적인 대용량 자료 처리에서는 처리 시간과 탐지 정확도 간의 균형점을 찾는 것이 핵심 과제이다. 전통적인 탄성파 자료 처리 절차는 각 단계마다 특정 유형의 잡음을 제거하고 신호를 향상시킬 수 있지만, 처리 단계가 증가할수록 연산 시간이 급격히 늘어날 수 있다. 따라서 실시간 모니터링 환경에서는 모든 자료 처리 절차를 다 적용하는 것이 아니라, 신호 탐지 성능 향상에 기여하면서 허용 가능한 범위 내의 처리 시간을 유지할 수 있는 최적의 처리 수준을 결정해야 한다. 이를 위해서는 각 처리 단계가 신호 탐지 성능에 미치는 영향을 정량적으로 분석하고, 처리 시간과 성능 간의 관계를 체계적으로 평가해야 한다. 또한 기계학습 기반 신호 탐지 모델의 경우, 모델 구조와 알고리즘 특성에 따라 탐지 성능과 연산 효율성이 크게 달라질 수 있다. 분류 모델과 객체 탐지 모델의 접근방식은 근본적으로 다르기 때문에 같은 자료에서도 서로 다른 성능 특성을 보일 수 있고, 모델에서 사용하는 자료의 조건이나 모델의 복잡도에 따라 처리 시간이 증가할 수 있어 실시간 처리의 적합성도 달라질 수 있다. 특히 DAS 자료의 특성상 높은 공간해상도로 연속적으로 취득되는 자료를 다루어야 하므로, 어떤 유형의 모델이 DAS 자료 특성에 더 적합한지 파악하는 것이 중요하다.
따라서 본 연구에서는 DAS 시스템을 활용한 준실시간 모니터링이 가능한 효율적인 자료 처리 절차와 최적의 신호 탐지 모델을 찾고자 하였다. 이를 위해 (1) 전통적인 자료 처리 절차를 단계별로 적용하면서 각 단계가 신호 탐지 성능과 처리 시간에 미치는 영향을 정량적으로 분석하고, (2) 서로 다른 특성을 가진 기계학습 모델의 성능을 비교하여 실시간 모니터링이 가능한 수준의 자료 처리를 수행하려면 어떤 단계의 자료 처리까지 수행해야 하며, 어떤 모델을 통해 신호 탐지를 수행하는 것이 적합한지 확인하고자 하였다.
본 논문의 구성은 다음과 같다. 먼저 연구에 사용된 Utah FORGE 지열 발전 프로젝트에서 취득한 DAS 자료를 소개하고, 적용된 전통적인 자료 처리 절차와 신호 탐지에 사용한 VGG-19 및 YOLO v11 모델의 구조를 설명한다. 연구 결과에서는 두 모델의 자료 처리 절차별 신호 탐지 결과를 시각적으로 분석하며, 토의에서 혼동 행렬(confusion matrix)를 활용해 모델의 성능을 정량적으로 계산한다. 또한 잡음 수준에 따른 신호 탐지 성능을 비교하며, 결론으로 논문을 마무리한다.
연구자료
본 연구에서는 미국 유타주에 위치한 Utah FORGE (Frontier Observatory for Research in Geothermal Energy) 지열발전 실증 사이트에서 취득한 DAS 자료를 활용하였다(Lellouch et al., 2020; Lellouch et al., 2021). 여러 모니터링 자료들 중 78-32번 모니터링 정(well)에서 2019년 4월 27일 iDAS장비를 통해 취득한 DAS 자료를 활용하였다. 해당 시기에는 지열 발전을 위한 수압 파쇄가 수행되어 이 과정에서 다양한 미소지진 이벤트가 발생하였다. 취득된 자료 중 미소 지진 이벤트가 존재하는 자료 30개를 선별하여 사용하였으며, 각 자료의 기록시간은 15초로 선행 연구(Lellouch, 2020; Lellouch et al., 2020; Lellouch et al., 2021)의 미소 지진 이벤트 카탈로그 자료를 일부 수정하여 정답 자료로 활용하였다.
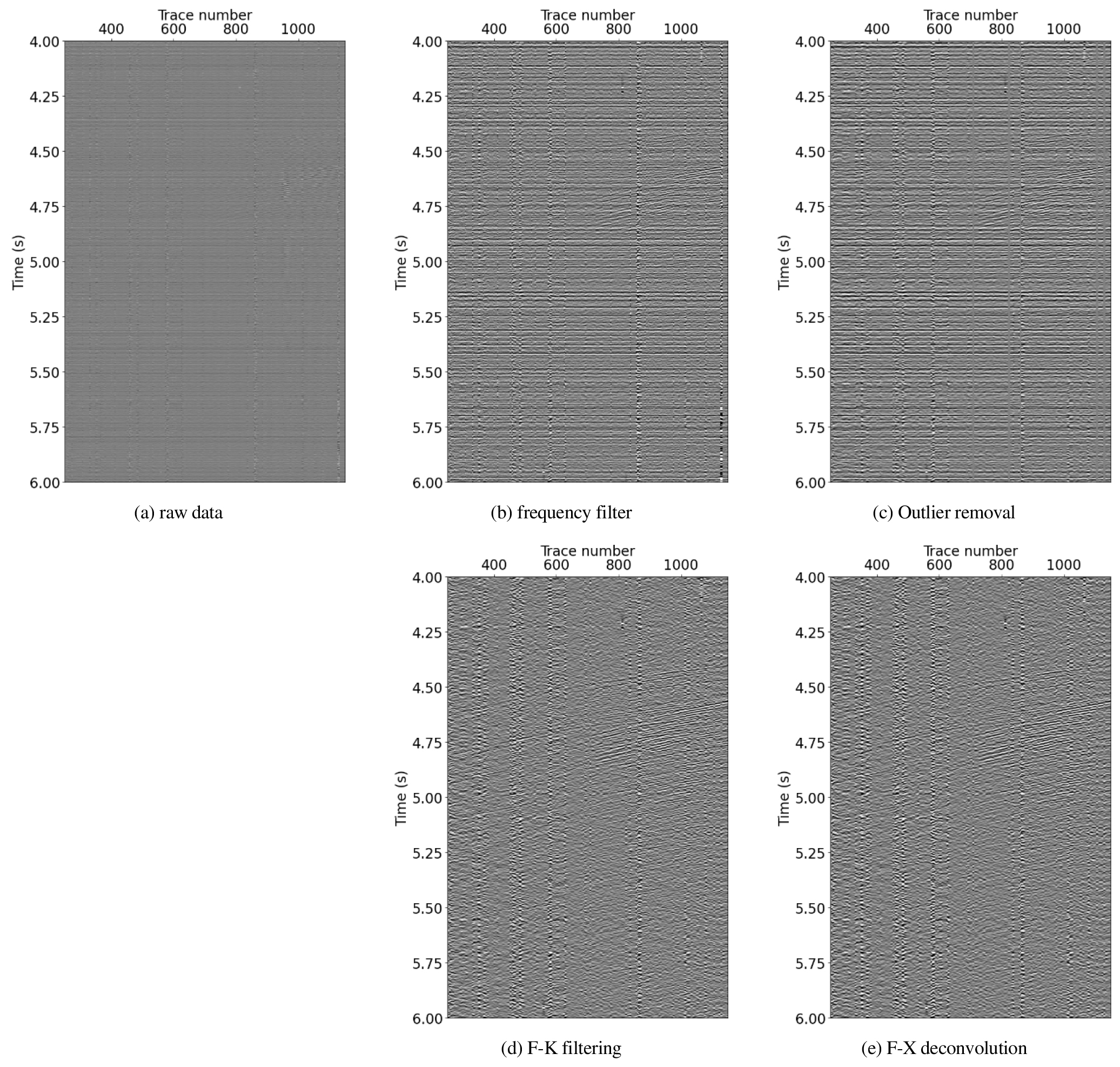
본 연구에서는 실시간에 가까운 신호 탐지를 위한 효율적인 자료 처리 절차를 찾기 위하여 전통적인 자료 처리 절차별 신호 탐지 성능을 비교하고자 하였다. 자료 처리 과정에서 소요되는 시간을 고려하여 전통적인 자료 처리 절차를 적용하고자 하였으며, 자료의 품질을 높이기 위해 DAS 케이블이 육상에 노출되어 큰 진폭의 잡음이 기록된 부분의 자료를 잘라낸 후, 주파수 필터, 이상 트레이스 제거, F-K 필터, F-X 디콘볼루션의 절차를 단계적으로 적용했다.
가장 먼저 주파수 필터를 통해 고주파수 및 저주파수 잡음을 억제하였으며, 트레이스의 평균 에너지가 사전에 설정된 임계값을 초과하는 트레이스를 제거하였다. 또한 F-K 필터를 이용하여 선형 잡음을 제거한 후, F-X 디콘볼루션을 통해 무작위 잡음을 제거하였다. 각 처리 단계별로 신호 탐지 정확도와 처리 시간을 측정하여 실시간 처리가 가능한 범위 내에서 최적의 신호 품질을 확보할 수 있는 단계를 결정하고자 하였다. 각 자료 처리 절차별 신호가 존재하는 4~6초 사이의 공통 송신원 모음 단면은 Fig. 1에 나타나 있다. 자료 처리 절차를 수행하기 전의 Fig. 1(a)부터 주파수 필터를 적용한 Fig. 1(b), 이상 트레이스 제거를 수행한 Fig. 1(c), 1(d)의 F-K 필터 적용과 Fig. 1(e)의 F-X 디콘볼루션 수행까지 자료 처리 절차를 수행할수록 선형 및 무작위 잡음이 제거되어 약 4.5초에서 5.25초 부근까지 미소지진 신호가 드러나는 것을 확인할 수 있다. 미소진동 준실시간 탐지를 위해서는 자료 처리 절차에 GUI 기반의 고성능 상용 소프트웨어를 사용하는 것 보다 자동화가 용이하며 처리 속도가 양호한 소프트웨어를 활용할 필요성이 있다고 판단하였다. 따라서 리눅스 환경에서 Seismic Unix 소프트웨어 및 파이썬 프로그램을 활용하였으며, 모든 자료 처리 절차는 shell script를 통해 자동화되어 수행되었다. 기계학습 모델을 학습시키기 위한 자료는 앞서 선별한 미소지진 이벤트가 기록된 30개의 자료에 단계별 자료 처리를 적용한 결과를 이용하여 생성하였다. 30개의 자료 중 일부(20학습, 9검증, 1테스트)를 사용하여 학습자료를 구축하였으며, 학습에 사용하지 않은 자료에 학습된 모델을 적용하여 각 자료 처리 절차별 처리 수준에 따른 신호 탐지 성능 변화를 비교 분석하고자 하였다.
신호 탐지 모델
본 연구에서는 미소지진 모니터링을 위한 자료 처리 절차별 신호 탐지 성능을 비교를 위해 단순한 구조의 분류 모델인 VGG-19와 널리 사용되는 객체 탐지 모델인 YOLO v11를 활용하였다.
VGG-19
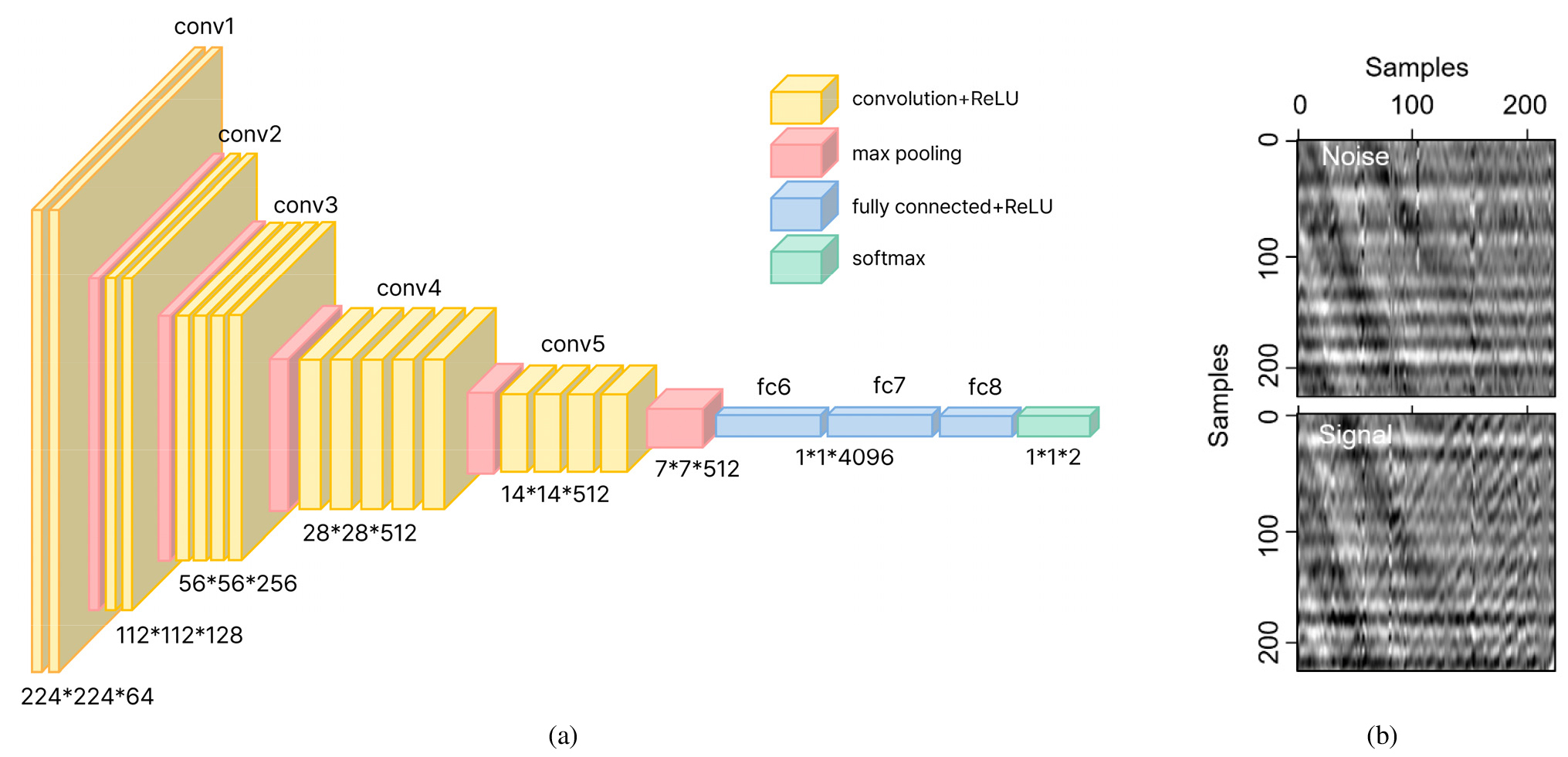
VGG-19는 Visual Geometry Group (VGG)에서 개발한 합성곱 신경망(Convolutional Neural Network, CNN) 구조로, 이미지 분류 분야에서 우수한 성능을 보여 온 모델이다(Xiao et al., 2020; Wen et al., 2019; Jaworek-Korjakowska et al., 2019). 16개의 합성곱 층(layer)과 3개의 완전 연결 층으로 구성된 모델로, 작은 크기의 합성곱 필터를 반복적으로 사용하여 이미지의 특징을 추출하는 단순하면서도 깊은 구조를 가지고 있다. 본 연구에서는 단순한 형태의 분류 모델을 활용하여 DAS 시스템을 통해 취득한 자료에서 효율적인 신호 탐지가 가능한지 확인하기 위해 PyTorch 기반의 VGG-19 모델을 구축하였다. ImageNet을 통해 사전 훈련된 가중치를 활용하였으며, 마지막 층에서 미소지진 신호와 잡음을 구분하는 이진 분류에 적합하도록 2개의 출력 유닛으로 수정하여 전이학습을 수행하였다. 본 연구에서 구축한 모델의 구조는 Fig. 2(a)에 제시되어 있다.
VGG-19 모델은 (224, 224) 크기의 입력 자료를 받아 다섯 개의 합성곱 블록을 통해 특징을 추출하며, 각 블록은 여러 개의 합성곱 층으로 구성된다. 각 블록 마지막에 배치된 맥스 풀링 층을 통해 공간 해상도를 단계적으로 축소하며, 필터의 개수는 64개에서 512개까지 점진적으로 증가하여 저수준 특징부터 고수준 특징까지 단계적으로 학습할 수 있다. 합성곱 단계를 거친 후 추출된 특징 맵은 세 개의 완전 연결 층을 통과하며, 마지막 층에서는 소프트맥스 함수를 통해 클래스별 확률 분포를 출력하여 신호의 경우 1, 잡음의 경우 0의 값을 출력하게 된다.
학습자료는 VGG-19 모델의 입력 패치 크기 (224, 224)를 고려하여 780개 샘플(1 m 간격)의 깊이 정보를 224개 샘플로 재샘플링(resampling) 하였으며 시간 축으로는 재샘플링을 하지 않았다. 그리고 시간 축 방향으로 24샘플씩 겹치면서 (224, 224) 크기의 패치를 순차적으로 추출하여 총 6079개의 패치를 생성하였다. 따라서 각 패치는 깊이 780 m (3.48 m 간격), 시간 0.112초(0.0005초 간격)에 해당하는 정보를 가진다. 전체 학습 자료 중 카탈로그 자료를 기준으로 신호가 존재하는 시간대를 포함하는 패치를 1로, 그렇지 않은 패치를 0으로 구분하여 라벨링하였으며, 이상 트레이스 제거 단계까지 수행된 자료에서 추출한 학습 패치 예시는 Fig. 2(b)에 도시되어 있다.
YOLOv11
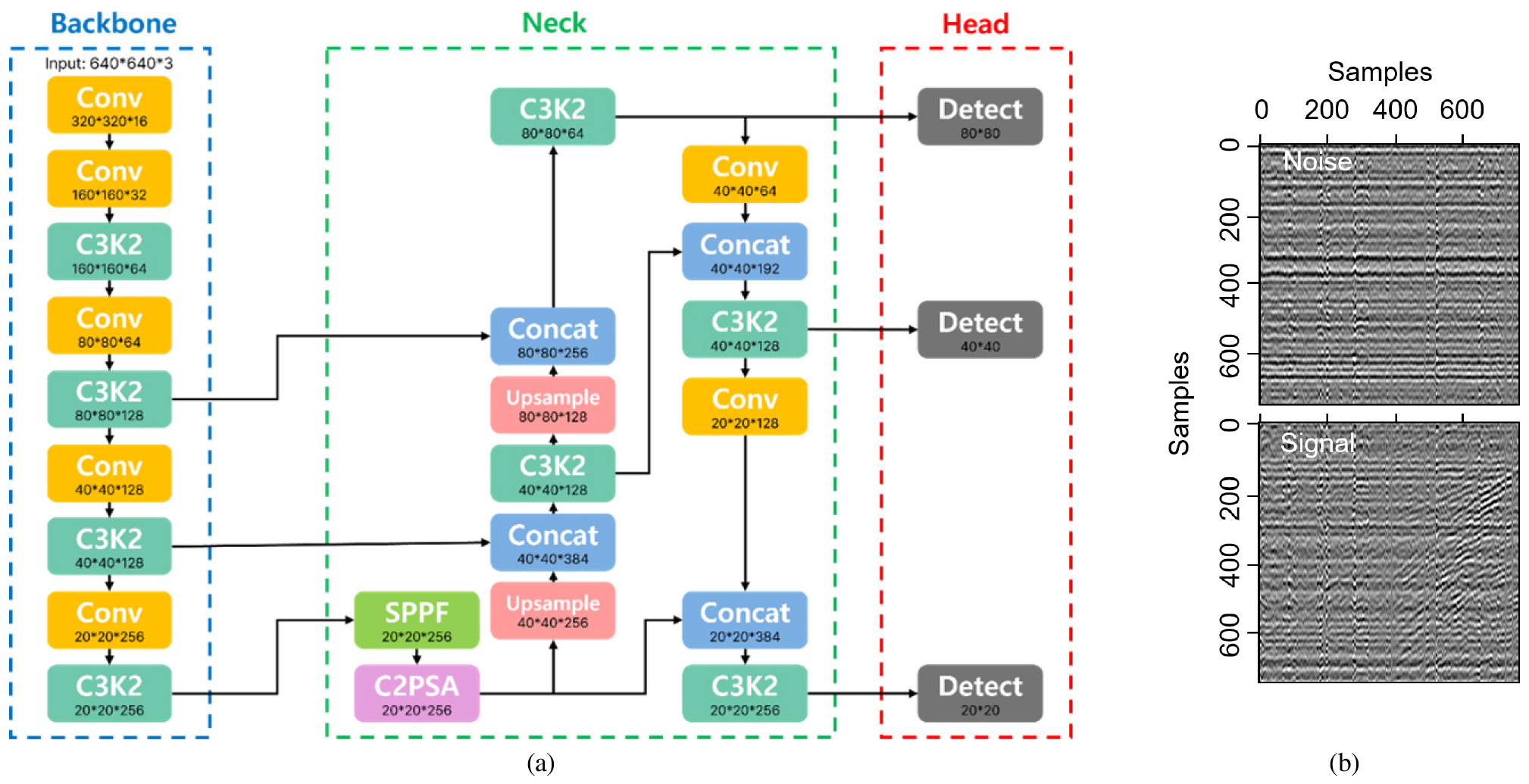
YOLO (You Only Look Once)는 실시간 객체 탐지 등 다양한 분야에서 널리 사용되는 딥러닝 모델로, 단일 네트워크를 통해 바운딩 박스(bounding box) 형식으로 객체 위치와 클래스를 동시에 예측한다(Redmon et al., 2016). 다중 스케일의 특징(feature)을 활용해 다양한 크기의 객체를 탐지할 수 있으며, 입력 자료로부터 특징 맵을 추출하는 백본(Backbone), 서로 다른 해상도의 특징을 결합하여 표현력을 향상시키는 넥(Neck), 특징 표현을 바탕으로 실제 예측을 수행하는 헤드(Head) 세 부분으로 이루어져 있다. 본 연구에서는 객체 탐지 모델을 통해서도 효율적인 미소지진 신호 탐지가 가능한지 확인하기 위해 YOLO v11 모델을 구축하였으며, 모델 구조는 Fig. 3에 제시되어 있다.
YOLO v11 (Jocher and Qiu, 2024)은 YOLO 시리즈 모델 중 이전 버전의 모델들보다 향상된 백본 네트워크와 효율적인 넥 구조를 채택하여 정확도와 처리 속도를 개선한 모델로 알려져있다(Khanam and Hussain, 2024). 백본은 합성곱 층과 C3K2 블록이 교차하여 구성되어 있으며, 층을 통과할수록 공간 해상도를 절반으로 축소하고 채널수를 증가시켜 다단계의 특징을 추출한다. 넥 모듈에서는 SPPF (Spatial Pyramid Pooling Fast)와 C2PSA 블록이 다양한 공간 범위에서 패턴을 인지하도록 도우며, 업샘플링(Upsampling) 및 결합(Concatenation) 연산을 적용해 다중 해상도의 특징 맵을 통해 크기가 다양한 객체를 안정적으로 탐지할 수 있도록 한다. 각 블록에 관한 자세한 설명은 Khanam and Hussain (2024)에서 확인할 수 있다. 마지막으로 헤드 모듈에서는 각 크기별 특징 맵으로부터 다양한 크기의 객체를 예측하여 클래스 확률, 객체 존재 확률과 바운딩 박스 좌표의 최종 탐지 결과를 산출하도록 설계되어있다. 본 연구에서는 사전학습된 백본 모듈의 가중치를 활용하여 사전학습된 일반 시각 특징을 유지하면서 미소 지진 신호와 잡음을 구별할 수 있도록 모델 재학습(fine-tuning)을 수행하였다.
학습 자료는 모델의 구조 및 원본 DAS 자료의 해상도를 고려하여 (750, 780) 크기의 패치로 구성하였으며, 시간 축 방향으로만 375샘플씩 겹치게 이동하며 패치를 추출하였다. 총 2291개의 학습 자료 패치를 생성하였으며, 각 패치는 깊이 780 m (1 m 간격), 시간 0.375초(0.0005초 간격)에 해당하는 영역을 나타낸다(Fig. 3(b)). 정답 신호 라벨링은 모델이 신호의 위치를 바운딩 박스(bounding box) 형태로 인식할 수 있도록 각 반사파 신호마다 1개의 바운딩 박스를 설정하였다. 한 바운딩 박스 영역 내에 다른 반사파 신호가 존재할 경우 해당 신호를 포함한 바운딩 박스를 추가로 설정해주었다.
자료 처리 과정별 신호 탐지 결과
모델 학습 및 학습 모델 적용
본 연구에서 사용한 하드웨어 환경은 다음과 같다. 주파수 필터링, 이상 트레이스 제거, F-K 필터링, F-X디콘볼루션의 전통적인 자료 처리 절차는 Intel(R) Xeon(R) Gold 5220R CPU @ 2.20 GHz를 이용하여 수행하였으며, 기계학습 기반의 신호 탐지 모델 학습과 테스트 자료에의 적용은 NVIDIA GeForce RTX 3090 GPU 환경에서 CUDA 11.4를 이용하여 실행하였다.
VGG-19 모델을 통한 신호 탐지는 Python 3.8 기반의 PyTorch 1.12.1 프레임워크를 이용하여 구현하였다. 모델 학습에는 다중 분류 문제에 널리 사용되는 CrossEntropyLoss 손실함수를 적용하였고, Adam 옵티마이저를 사용하였다. 총 20번의 epoch를 반복하여 검증 손실이 가장 낮고 검증 정확도가 가장 높은 모델을 최종 모델로 선택하였다.
YOLO v11 모델은 효율적인 YOLO 모델 구현을 제공하는 Ultralytics 3.8.105 라이브러리를 이용해 프로그램을 작성하였다. 모델 학습에는 바운딩 박스 회귀 손실(Box Regression Loss), 객체성 손실(Objectness Loss), 분류 손실(Classification Loss)의 가중합인 복합 손실을 이용해 객체의 위치 탐지와 분류를 동시에 최적화하도록 설계되었다. 옵티마이저로는 AdamW 옵티마이저를 이용하였으며, 총 500번의 epoch를 반복하여 검증 손실이 가장 낮은 모델을 최종 모델로 선택하였다.
최종 학습된 모델들의 일반화 성능을 검증하기 위해 별도의 테스트 자료를 선별하여 사용하였다. 테스트 자료는 앞서 설명한 연구자료들 중 2019년 4월 27일 17시 58분 23초부터 15초 동안 기록된 자료로, 약 4.5초부터 5.25초 대의 영역에 미소지진 신호가 존재한다. 해당 자료는 모델 학습 및 검증에 사용되지 않은 자료로, 각 모델의 성능 검증을 위해 테스트 자료에 모델을 적용하고 결과를 비교하였다.
VGG-19
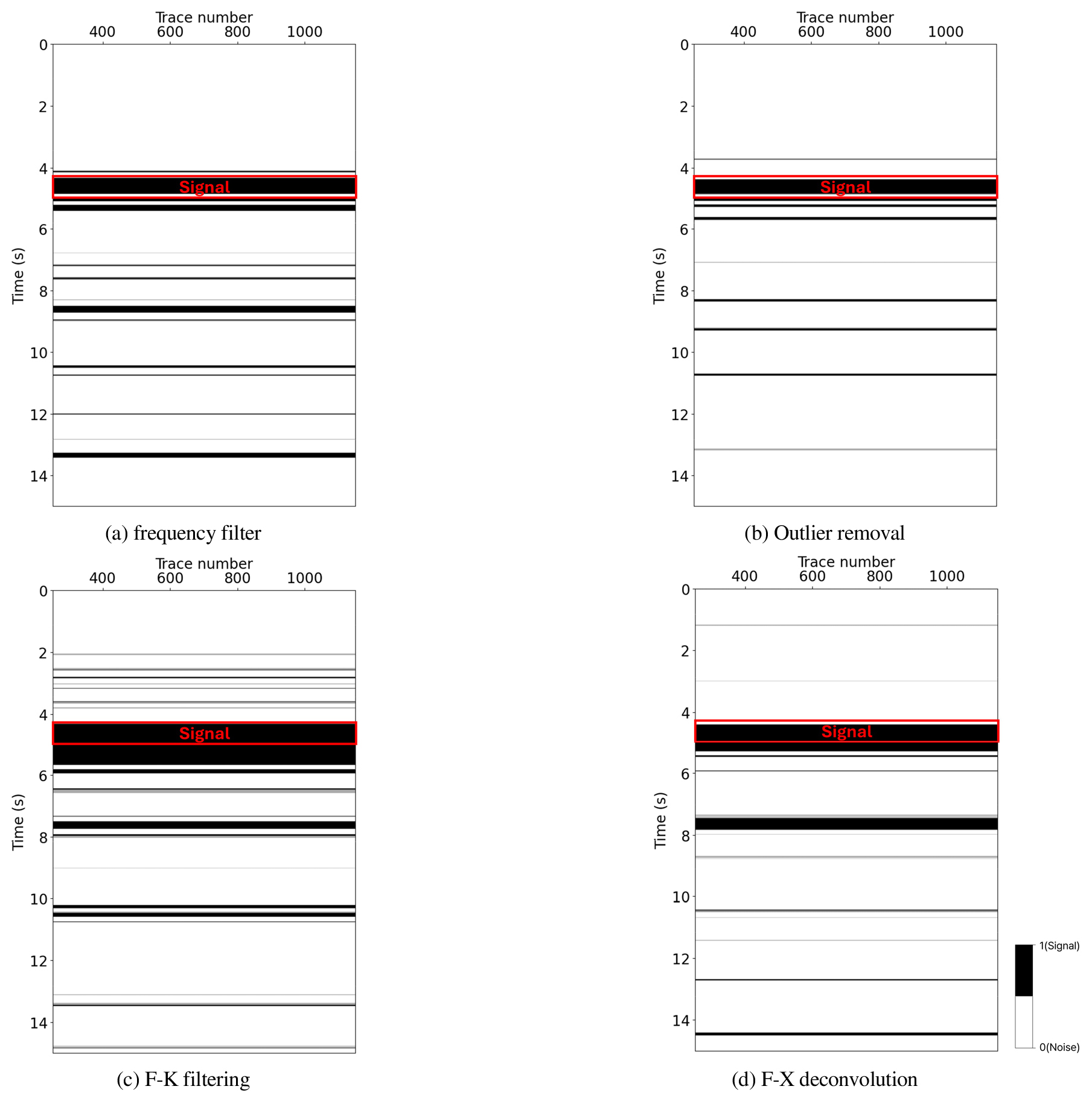
VGG-19 모델은 분류 모델로, 본 연구에서는 모델을 통해 각 패치를 미소지진 신호가 포함된 패치와 포함되지 않은 패치를 분류하도록 설계하였다. 자료 처리 절차별로 VGG-19 모델을 적용하여 신호 탐지를 수행하였으며, 학습 패치 생성 방식과 동일하게 24샘플씩 겹치며 (224, 224) 크기의 패치로 분할한 후 각 패치의 신호 포함 여부를 예측하였다. 이후 겹치는 구간의 탐지 확률을 평균하여 원본 자료 전체의 크기로 복원해 전체 구간에 대한 탐지 결과를 매핑하였으며, 결과는 Fig. 4에 제시되어 있다.
라벨링 과정에서 확인된 테스트 자료의 실제 미소 지진 신호는 4.4초부터 4.8초 구간에 위치한다. 주파수 필터만 적용한 초기 단계에서 VGG-19 모델을 통해 미소지진 신호를 탐지한 결과, 실제 신호가 존재하는 시간대를 포함하여 약 4초에서 5.5초에 이르는 넓은 영역을 신호로 인식하는 것으로 나타났다(Fig. 4(a)). 이는 모델이 신호와 함께 주변의 잡음까지 탐지했음을 의미한다. 또한 신호가 존재하지 않는 위치에 신호가 존재한다고 잘못 판단하는 오탐지 현상을 확인할 수 있으며, 주파수 필터만으로는 신호만을 구별하기 어렵다는 것을 보여준다. 이상 트레이스 제거 자료에 신호 탐지 모델을 적용한 결과(Fig. 4(b)), 일부 트레이스에서 모든 시간대에 걸쳐 지속적으로 나타나는 큰 진폭의 잡음 성분이 효과적으로 제거되면서 오탐지가 줄어드는 것을 확인할 수 있다. 따라서 이상 트레이스 제거를 통해 진폭을 조정하여 전체적으로 진폭 균형을 맞춤으로써 모델이 실제 신호와 배경 잡음을 더 잘 구분할 수 있다고 판단했다. F-K 필터 적용 후 신호 탐지 결과(Fig. 4(c))에서는 실제 신호가 존재하는 영역을 포함한 주변 영역까지 넓게 신호로 탐지한 것을 확인할 수 있으며, 이전 단계에 비해 신호가 존재하지 않는 부분을 신호로 오탐지한 영역도 늘어났다. 이는 F-K 필터를 적용하는 과정에서 일부 잡음이 증폭 및 왜곡되어 나타나는 현상으로 보인다. 반면 F-X 디콘볼루션을 수행한 결과(Fig. 4(d))에서는 7초에서 8초에 이르는 영역을 신호로 오탐지하나, 신호로 탐지한 영역이 줄어들고 이전 단계에 비해 오탐지도 줄어든 것을 확인할 수 있다. 이를 통해 F-X 디콘볼루션 과정으로 무작위 잡음이 제거되었으나, F-K 필터 적용 이후 발생했던 왜곡이 신호 오탐지에 영향을 주었다고 판단하였다.
YOLO v11
YOLO v11 모델은 객체 탐지 모델로, 본 연구에서는 모델을 통해 탐지한 미소지진 신호의 위치를 바운딩 박스(bounding box)로 표시하여 탐지 확률과 함께 도시하였다(Fig. 5). YOLO 모델은 한 이미지 내에서 다양한 크기의 객체를 탐지할 수 있으므로, 인접한 여러 구역을 겹쳐서 예측하는 경우도 존재한다. YOLO v11 모델을 자료 처리 절차별 결과에 적용하여 신호를 탐지한 결과는 Fig. 5에 제시되어 있다. YOLO v11 모델을 통해 신호를 탐지한 결과, 모든 실험에서 신호가 존재하지 않는 부분을 신호로 오탐지한 사례가 발견되지 않았으므로 Fig. 5에는 신호가 탐지된 구간만 확대하여 도시하였다.
Fig. 5은 자료처리 단계별 신호가 존재하는 약 4.3초에서 4.8초 대의 영역을 확대하여 표시한 것으로, 각 자료에서 신호로 예측된 부분은 파란색 바운딩 박스와 예측 확률이 표시된다. 신호 탐지 모델 적용시 놓치는 신호 없이 신호를 보수적으로 탐지하기 위해 예측 확률이 0.3 이상인 경우에만 신호로 인식하도록 임계값을 설정하였다. 주파수 필터 적용 자료에 YOLO 모델 기반의 신호 탐지를 수행한 결과(Fig. 5(a)), 실제 신호가 존재하는 위치를 여러 개의 바운딩 박스에 걸쳐 적절히 탐지한 것을 확인할 수 있다. 이상 트레이스 제거를 적용한 자료에서는 신호의 일부만 탐지되었는데(Fig. 5(b)), 이는 큰 진폭의 잡음이 제거되면서 전체적인 진폭 균형은 맞춰졌으나 이미지에서 신호와 잡음이 적절히 구별되지 않아 발생한 것으로 판단된다. F-K 필터 적용 후에는 선형 잡음이 제거되면서 신호 영역을 더 넓게 탐지하였으며(Fig. 5(c)), F-X 디콘볼루션 적용 후 자료에서는 무작위 잡음이 효과적으로 제거되어 신호 영역을 보다 넓게 탐지하였다(Fig. 5(d)).
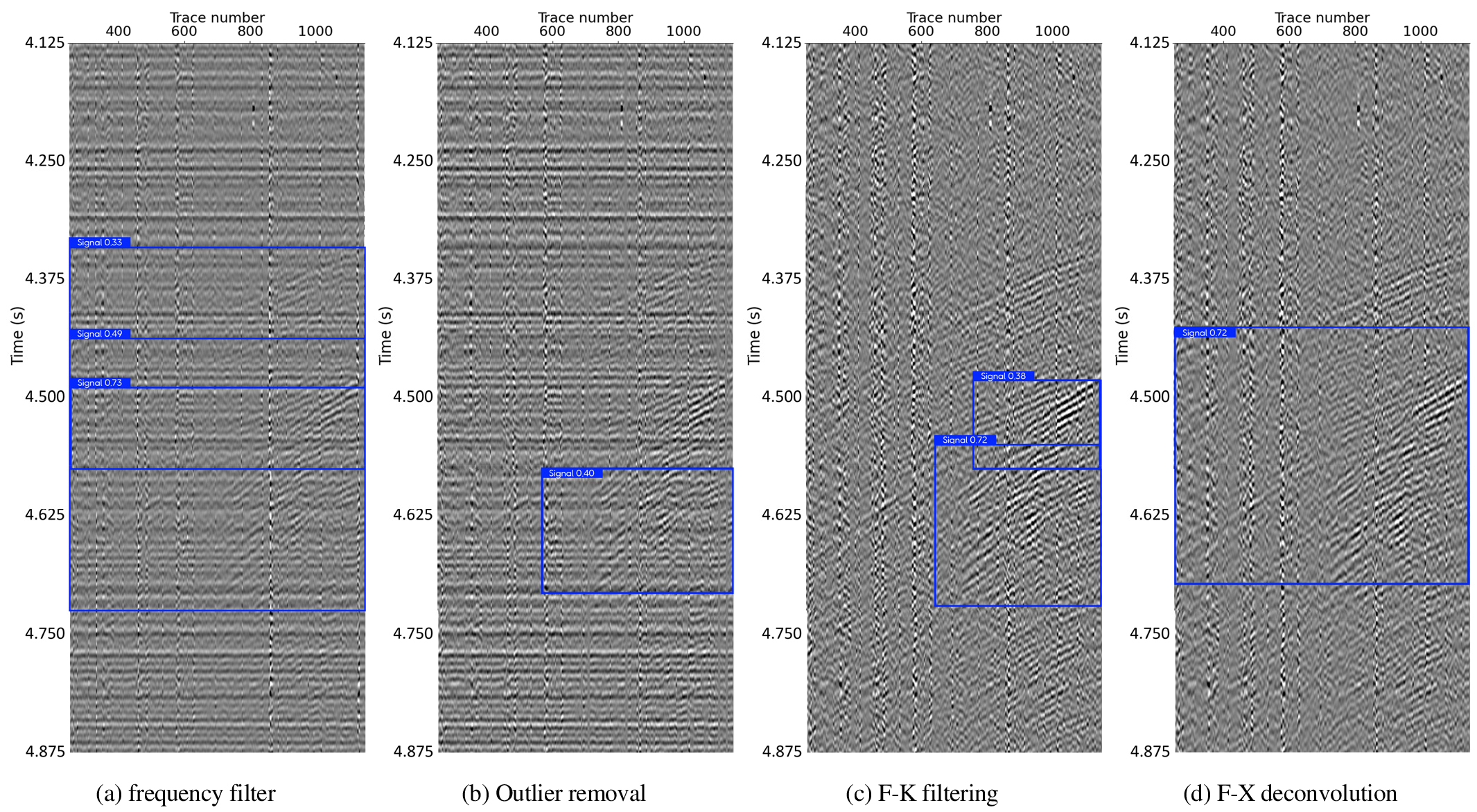
자료 처리 절차별 전체적인 경향을 살펴보면, 자료 처리 과정에 따라 두 모델 간의 차이가 발생하는 것을 확인할 수 있다. VGG-19 모델을 통해 신호 탐지를 수행한 경우, 주파수 필터와 이상 트레이스 제거를 차례로 적용하면서 신호 오탐지가 점진적으로 줄어들었다. 하지만 F-K 필터 적용 과정에서 자료에 왜곡이 발생하면서 탐지 성능이 일시적으로 저하되었다가, F-X 디콘볼루션을 통해 어느정도 회복되었다. 따라서 VGG-19 모델에서는 이상 트레이스 제거까지 적용된 자료에서 오탐지가 가장 적고 실제 신호가 존재하는 영역을 적절히 예측하였다.
반면, YOLO v11 모델에서는 다른 양상을 보였다. 주파수 필터만 적용한 초기 단계에서 신호를 가장 적절히 탐지했지만, 이상 트레이스 제거 과정에서 신호의 일부가 손실되면서 객체 탐지가 제대로 수행되지 않아 탐지 영역이 줄어들었다. 이후 F-K 필터와 F-X 디콘볼루션을 순차적으로 적용하면서 회복되는 경향을 보였다. 따라서 YOLO v11 모델의 경우 주파수 필터까지만 적용한 자료에서 미소지진 신호를 가장 효과적으로 탐지할 수 있는 것으로 판단된다.
그러나 이러한 시각적 관찰에 기반한 정성적인 분석만으로는 각 단계별 모델의 신호 탐지 성능을 객관적으로 비교하고 평가하는 데는 한계가 있다. 따라서 보다 정확한 성능 비교를 위해 정량적 지표를 활용한 성능 평가가 수행되어야 한다.
토 의
신호 탐지 성능 정량 평가
VGG-19 모델과 YOLO v11 모델은 각각 분류 모델과 객체 탐지 모델로 목적이 서로 다르며 모델의 구성 방식과 학습 자료의 형태 또한 다르기 때문에 두 모델의 신호 탐지 성능을 정량적으로 비교할 때 동일한 지표를 직접 적용하기는 어렵다. 따라서 두 모델의 신호 탐지 특성을 유사한 기준에서 평가해보기 위해서 본 연구에서는 VGG-19 모델의 예측 결과에 대한 성능 평가 지표 계산 방식과 동일하게 YOLO v11 모델을 통해 예측한 바운딩 박스가 존재하는 시간대 전체를 신호가 탐지된 구간으로 간주하여 성능을 계산하였다.
여러 성능 지표 중 분류 모델의 성능을 평가에 널리 사용되는 혼동 행렬(confusion matrix)을 활용하여 두 모델의 신호 탐지 성능을 계산하였다. 혼동 행렬은 실제 정답과 모델의 예측 결과를 표 형태로 비교한 것으로 Table 1과 같이 네 개의 항목으로 구성된다.
Table 1
Confusion matrix components.
| Predict | |||
| Positive | Negative | ||
| Actual | Positive |
True Positive (TP) |
False Negative (FN) |
| Negative |
False Positive (FP) |
True Negative (TN) | |
TP (True Positive)는 실제 미소지진 신호가 존재한 위치를 모델도 신호로 정확히 탐지한 경우이며, TN (True Negative)은 실제 신호가 존재하지 않는 위치를 모델도 신호가 없다고 올바르게 판단한 경우를 의미한다. 반면, FP (False Positive)는 실제로는 신호가 없는 위치를 모델이 신호가 있다고 잘못 판단 오탐지의 경우이며, FN (False Negative)은 실제로 신호가 있는 위치를 모델이 신호가 없다고 잘못 판단한 미탐지의 경우를 나타낸다. 신호를 정확하게 탐지하는 이상적인 모델이라면 TP와 TN 값은 높게, FP와 FN 값은 낮게 나타나야 한다. 특히 성공적인 미소지진 탐지를 위해서는 신호를 모델이 놓치는 경우인 FN을 최소화하는 것이 매우 중요하다.
혼동 행렬의 각 값을 이용해 Accuracy (정확도), Precision (정밀도), Recall (재현율), F1-score를 계산할 수 있으며, 각 지표는 식 (1)~(4)를 통해 계산된다(Sathyanarayanan and Tantri, 2024).
정확도(Accuracy)는 전체 예측 중에서 올바른 예측의 비율을 나타내고, 정밀도(Precision)는 모델이 신호가 존재한다고 예측한 것 중에서 실제로 신호인 비율을 의미한다. 재현율(Recall)은 실제 신호 중에서 모델이 올바르게 탐지한 비율이며, F1-score는 정밀도와 재현율의 조화평균으로 계산된다. 네 지표 모두 1에 가까울수록 우수한 탐지 성능을 나타낸다. 특히 미소지진 모니터링 분야에서는 재현율이 높을수록 신호를 놓치지 않고 모든 미소지진 이벤트를 탐지할 수 있다는 것을 의미하므로, 높은 재현율을 가진 모델을 선택하는 것이 중요하다.
본 연구에서는 혼동 행렬을 활용한 성능 지표 계산과 동시에, 실시간에 가까운 모니터링을 수행하기 위해 어떤 단계까지의 자료 처리를 수행해야 하는지 파악하고자 자료 처리부터 모델 적용까지 소요되는 시간을 측정하였다. 15초 길이의 테스트 자료에 대해 각 자료 처리 절차를 순차적으로 적용하였으며, 자료는 시간축 방향으로 30000개의 샘플과 가로 방향으로 780개의 트레이스로 구성된다. 각 자료 처리 절차별 평균 소요 시간은 Table 2에 제시되어 있으며, 주파수 필터 약 0.95초, 이상치 제거 약 0.7초, F-K 필터 약 3.32초, F-X 디콘볼루션 약 2.06초이다. VGG-19와 YOLO v11 두 모델의 자료 처리 절차별 신호 탐지 성능은 각각 Table 3, 4에 제시되어 있으며, Fig. 6에서 각 수치를 그래프로 나타내었다.
Table 2
Processing time for each data processing procedures.
Table 3
Signal detection performance of VGG-19 model by data processing stages using confusion matrix.
| Frequency filter | Outlier removal | F-K filter | F-X deconvolution | |
| Accuracy | 0.9249 | 0.9599 | 0.8828 | 0.9372 |
| Precision | 0.3550 | 0.5324 | 0.2759 | 0.4156 |
| Recall | 0.8328 | 0.8328 | 1.0 | 1.0 |
| F1-score | 0.4978 | 0.6495 | 0.4325 | 0.5872 |
| Time* | 13.6494 | 14.8937 | 17.4821 | 20.1861 |
Table 4
Signal detection performance of YOLO v11 model by data processing stages using confusion matrix.
| Frequency filter | Outlier removal | F-K filter | F-X deconvolution | |
| Accuracy | 0.9789 | 0.9584 | 0.9752 | 0.9707 |
| Precision | 1.0 | 0.5823 | 1.0 | 1.0 |
| Recall | 0.5269 | 0.2455 | 0.4455 | 0.5067 |
| F1-score | 0.6901 | 0.3454 | 0.6164 | 0.6726 |
| Time* | 28.6921 | 28.9136 | 30.6069 | 33.2345 |
| mAP50 | 0.0743 | 0.1223 | 0.5002 | 0.2731 |
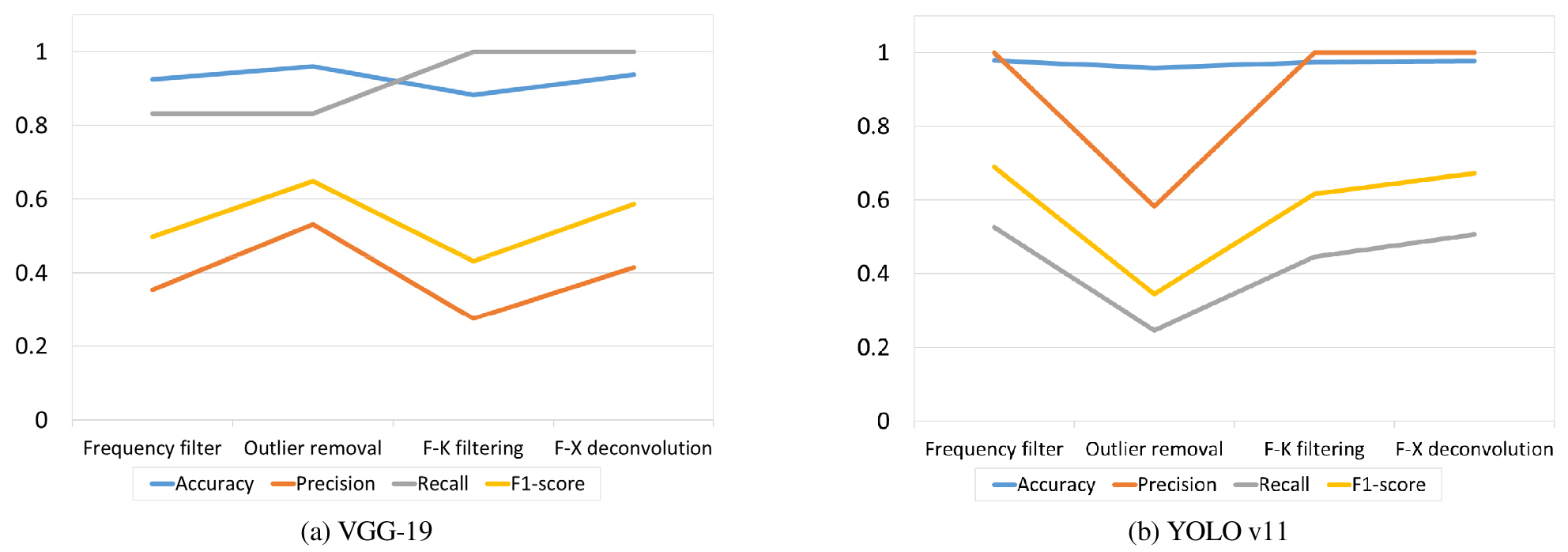
VGG-19 모델의 경우, 앞서 신호 탐지 결과 분석에서 확인한 내용과 일치하게 주파수 필터와 이상 트레이스 제거를 단계적으로 적용할수록 탐지 성능이 향상되는 것을 확인할 수 있다. 이후 자료의 왜곡으로 인해 F-K 필터 적용 후 탐지 성능이 일시적으로 저하되었다가 F-X 디콘볼루션을 통해 회복된 현상을 정확도, 정밀도, F1-score 수치를 통해 확인 할 수 있다. 특히 F-K 필터 적용 이후 정밀도가 낮아져 오탐지는 증가했으나 재현율이 1로 높아져 실제 신호가 존재하는 모든 부분을 놓치지 않고 탐지하였다.
자료 처리 과정별 신호 탐지에 소요되는 시간을 비교한 결과, 자료 처리 절차가 복잡해질수록 소요시간도 증가하였다. 특히 F-K 필터를 적용하고 F-X 디콘볼루션을 수행하는 과정에서 약 2.5초 이상의 시간이 소요되는 것을 확인할 수 있다. 준실시간 모니터링에서는 처리 및 탐지에 걸리는 시간 역시 중요한 고려사항이므로, 자료가 기록된 시간 대비 처리 시간을 고려해야 한다. 본 연구에서 사용한 테스트 자료의 기록 시간은 15초이며 일반적인 DAS 장비 자체 포멧(e.g. tdms)을 su 형태로 변환하는데 필요한 시간이 1초 내외임을 감안할 때, 비교적 높은 탐지 성능을 보이면서도 소요 시간이 15초 이내로 짧게 나타난 이상 트레이스 제거 단계까지 수행한 후 신호 탐지를 실시하는 것이 가장 합리적이라고 판단된다.
YOLO v11 모델에서도 앞서 결과 분석에서 확인한 내용과 유사한 성능 계산 결과를 보인다. 주파수 필터 적용 후 신호를 탐지한 결과에서 정확도, 정밀도, 재현율과 F1-score가 전반적으로 높게 나타났으며, 이상 트레이스 제거를 거치면서 탐지 성능이 일부 감소하였다. 이후 자료 처리 절차를 수행하면서 탐지 성능이 점진적으로 향상되었으며, 특히 정밀도가 개선되어 오탐지 없이 신호를 탐지한 것을 확인할 수 있다. 하지만 VGG-19 모델을 통해 신호를 탐지한 결과(Table 3)와는 달리, 이상 트레이스 제거 이후 재현율이 0.3 이하로 낮아졌으며, 자료 처리 절차를 수행하면서 상승하긴 하나 여전히 낮은 수치를 보여 YOLO v11 모델을 통한 신호 탐지 수행 시 일부 놓치는 신호가 발생하였다. 또한 YOLO v11 모델 평가에서 중요한 mAP50 수치의 경우 F-K 필터 적용 후 가장 높은 값을 보인다.
자료 처리 및 신호 탐지에 소요되는 시간을 계산한 결과, 자료 처리 절차가 증가할수록 소요 시간이 늘어나는 것을 확인할 수 있다. 전체적으로 VGG-19 모델보다 더 많은 시간이 소요되는데, 이는 본 연구에서 구축한 YOLO v11 모델에서는 객체를 탐지하기 위해 취득된 자료를 이미지 파일로 변환하는 과정과 생성한 패치별로 신호를 탐지하는 과정에서 추가적인 시간이 필요하기 때문이다. 미소지진 이벤트 탐지에 YOLO v11 모델을 활용할 경우,각 처리 절차별 성능을 종합적으로 고려했을 때 높은 전반적으로 양호한 성능을 보인 주파수 필터까지 적용된 단계에서 신호 탐지를 수행하는 것이 합리적이며, mAP50 수치까지 고려한다면 F-K 필터까지 수행한 단계가 적절할 것으로 판단된다. 하지만 YOLO v11 모델의 경우 자료 준비 및 예측에 필요한 시간이 길기 때문에 소요 시간을 효과적으로 감소시키는 방안이 개발될 필요가 있다.
학습 자료의 형태, 모델의 신호 예측 방식, 모델의 구조 측면에서 VGG-19 모델과 YOLO v11 모델은 큰 차이를 보인다. 따라서 두 모델 간의 예측 성능에 대한 직접적인 비교를 수행하기는 어렵지만, 각 모델의 혼동 행렬 계산 결과를 비교해보면 두 모델 간의 특성 차이를 확인할 수 있다. 우선 두 모델 모두 정확도가 0.85 이상으로 높게 나타나며 자료의 클래스간 불균형이 높은 정확도에 일정부분 기여한 것으로 판단된다. 정밀도 측면에서는 VGG-19 모델보다 YOLO v11 모델이 전반적으로 높은 값을 가지는데, 이는 YOLO v11 모델이 자료 처리 수준이 높아질수록 일부 영역에서 놓치는 신호가 존재하지만 오탐지가 적기 때문이다. 반면 재현율 측면에서는 VGG-19 모델이 더 높은 값을 가지는데, 이는 적정 수준의 자료 처리가 수행되면 일부 오탐지는 발생하지만 놓치는 신호 없이 실제 신호가 존재하는 위치 주변 영역을 넓게 탐지하여 자료에 존재하는 모든 신호를 찾아내기 때문으로 간주된다. F1-score를 통해 두 모델의 특성을 비교해 보면, VGG-19 모델은 높은 재현율로 인해 신호를 놓치지 않는다는 장점이 있지만, 오탐지로 인한 정밀도 저하가 F1-score에 영향을 미친다. 반면 YOLO v11 모델은 높은 정밀도를 보이지만 일부 신호를 놓치는 경우가 F1-score에 반영된다. 따라서 실제 모니터링 목적과 요구사항에 따라 높은 재현율을 우선시할지 높은 정밀도를 우선시할지에 따라 모델 선택이 달라질 수 있다. 그리고 두 자료에서 공통적으로 나타나는 현상 중 하나는, 자료 처리 단계에 따라 일관성 있는 성능 향상이 나타나지는 않는다는 점이다. 육안으로 보이는 잡음 수준이 상당부분 개선되었음에도 예측 성능이 떨어지는 구간도 있으며, 수치별로 서로 다른 경향을 보이는 부분도 있다. 이는 불완전한 자료 처리, 학습 자료 수의 부족, 학습 자료의 클래스간 불균형 등에 의해 나타나는 현상으로 추정된다.
기계학습 기반 잡음 제거와 신호 탐지 성능
앞서 자료 처리 수준에 따른 신호 탐지 성능을 비교 분석한 결과에서는 주파수 필터, 이상 트레이스 제거, F-K 필터, F-X 디콘볼루션과 같은 전통적인 자료처리 절차를 순차적으로 적용한 결과만 다루었다. 그러나 최근 딥러닝 기술의 발전과 함께 탄성파 자료 처리 분야에서도 기계학습 기반의 잡음 제거 기법들이 활발히 연구되고 있으며, 이러한 방법들을 전통적인 처리 기법과 비교했을 때 어떤 성능을 보이는지 확인할 필요가 있다. 따라서 본 연구에서는 추가적으로 탄성파 자료의 잡음 제거에 널리 사용되는 Denoising Convolutional Neural Network (DnCNN; Zhang et al., 2017; Jun et al., 2020; Jun and Kim, 2024) 모델을 활용해 잡음을 제거한 자료에서도 신호 탐지를 수행하고 성능을 정량적으로 계산했다. 해당 기계학습 기반의 잡음 제거 자료는 기본적인 주파수 필터만 적용된 자료에 DnCNN 모델을 적용하여 수행하였다.
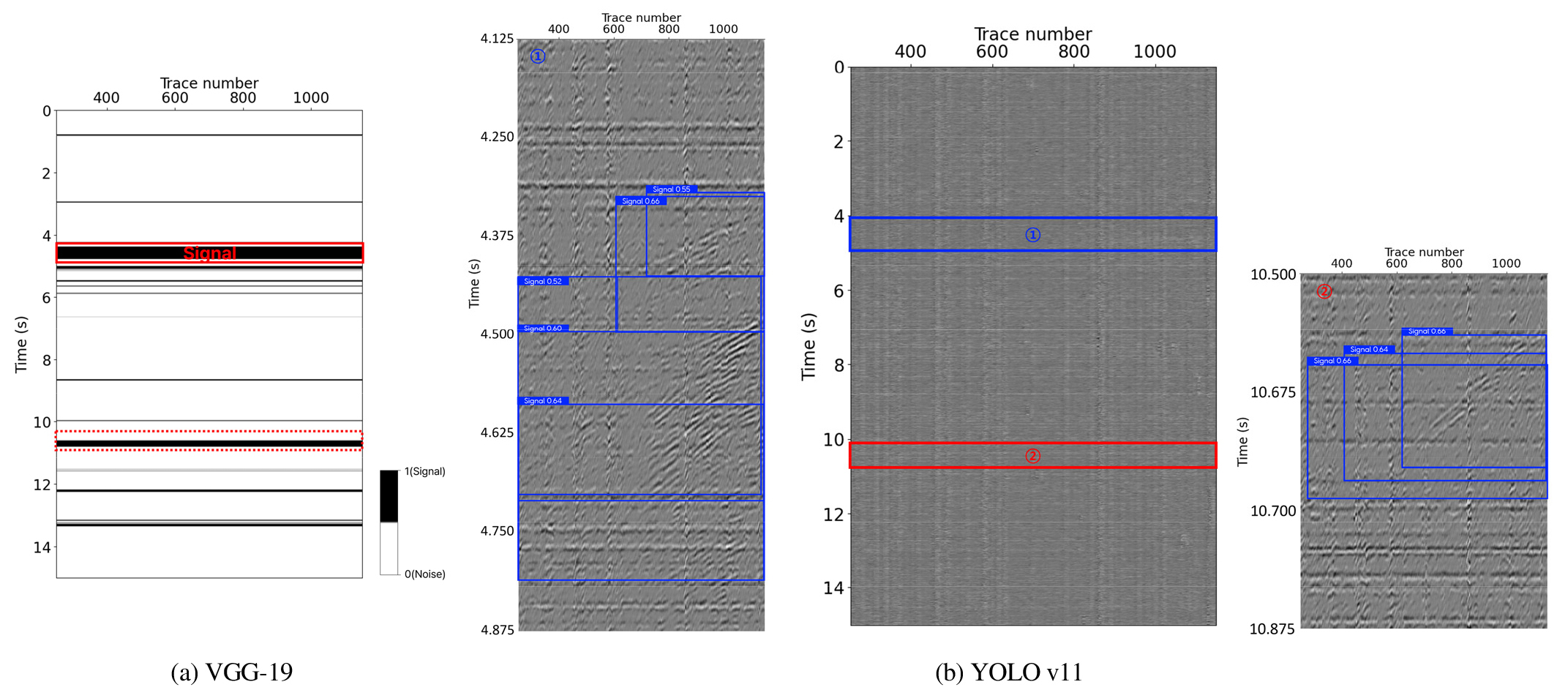
Fig. 7은 DnCNN 모델을 통해 잡음을 제거한 자료에 VGG-19와 YOLO v11 모델을 각각 적용하여 신호 탐지를 수행한 결과이다. DnCNN 기반의 잡음 제거 결과(Fig. 7(b)), 무작위 잡음과 강한 진폭의 잡음들이 상당 부분 효과적으로 억제되었다. 그러나 수평 방향의 일관성 있는 잡음 패턴이 일부 남아있으며, Fig. 1의 전통적인 자료 처리 적용 결과와 비교했을 때 일부 신호 성분이 손실되는 현상도 관찰된다. VGG-19 모델 적용 결과(Fig. 7(a)), 실제 미소지진 신호가 존재하는 위치를 모델 또한 신호로 예측하고 있는 것을 확인할 수 있다. 이 결과를 Fig. 4 의 전통적인 자료 처리 절차에 탐지 모델을 적용한 결과와 비교해보면, 탐지 성능이 가장 양호하였던 이상 트레이스 제거 결과와 유사한 수준의 성능을 보이는 것으로 나타난다. 이는 DnCNN 기반 잡음 제거가 주파수 필터링 및 이상 트레이스 제거를 수행한 것과 비슷한 효과를 주면서도 보다 정교한 잡음 제거가 가능함을 의미한다.
YOLO v11 모델을 통해 탐지한 결과(Fig. 7(b))에서는 실제 신호가 존재하는 구간을 정확히 탐지할 뿐만 아니라, Fig. 5의 전통적인 자료 처리 절차들보다 더 넓은 형태로 신호를 인식하는 것을 확인할 수 있다. 특히 바운딩 박스의 크기와 위치가 실제 신호 영역과 더 잘 일치한다.
5.1장에서 제시한 혼동행렬을 활용한 정량적 성능 평가 방법을 동일하게 적용해 DnCNN 기반 잡음 제거 후 VGG-19와 YOLO v11 신호 탐지 모델의 성능을 계산한 결과는 Table 5에 제시되어 있다. VGG-19 모델의 경우 정확도 0.9345, 정밀도 0.3687, 재현율 0.6537, F1-score 0.4715로 DnCNN 기반의 잡음 제거를 통해 미소지진 모니터링에 가장 적합하다고 판단했던 이상 트레이스 제거 단계의 수치(정확도 0.9599, 정밀도 0.5324, 재현율 0.8328, F1-score 0.6495)에는 조금 못미치는 성능을 보이는 것을 확인할 수 있다. YOLO v11 모델에서는 정확도 0.984, 정밀도 0.8605, 재현율 0.8649, F1-score는 0.8627로 모두 0.85 이상의 높은 수치를 기록하였으며, 이는 YOLO v11 모델로 신호 탐지를 수행할 때 가장 합리적이라고 판단했던 주파수 필터 적용 후의 결과(정확도 0.9737, 정밀도 0.9019, 재현율 0.6126, F1-score 0.7296)보다 모든 거의 모든 지표에서 향상된 성능을 보여준다. 이러한 결과는 DnCNN 기반 잡음 제거가 YOLO v11 모델의 탐지 능력을 크게 향상시킬 수 있음을 의미한다.
Table 5
Signal detection performance of VGG-19 and YOLO v11 models after DnCNN-based denoising.
자료 처리 및 탐지에 소요되는 시간을 측정한 결과 VGG-19 모델이 약 34.4초, YOLO v11 모델이 약 45.4초가 소요되는 것으로 나타났다. 이는 앞서 결과 분석에서 제시한 이상 트레이스 제거 후 VGG-19 모델을 적용한 시간(약 15초)과 주파수 필터 적용 후 YOLO v11 모델을 이용한 신호 탐지 시간(약 29초)보다 긴 시간이다. 이러한 시간 증가는 DnCNN 모델을 이용한 잡음 제거 과정에서 추가적인 연산이 필요하고, 이후 다시 기계학습 기반의 신호 탐지를 수행하는 이중 처리 구조 때문이다.
DnCNN 모델 기반의 잡음 제거 후 YOLO v11을 통해 신호 탐지를 수행한 결과에서 Fig. 7(b)-②에서 볼 수 있듯이, 실제 신호가 존재하는 위치 외의 다른 시간대에서도 추가적인 신호를 탐지한 것을 확인할 수 있다. 해당 신호는 학습 및 테스트 자료 생성시 참고했던 기존 미소지진 이벤트 카탈로그(Lellouch, 2020; Lellouch et al., 2021)에 기록되지 않은 신호로, 정답 자료 라벨링 과정에서 사용하지 않았던 미소지진 이벤트를 모델이 자동으로 탐지한 것이다.
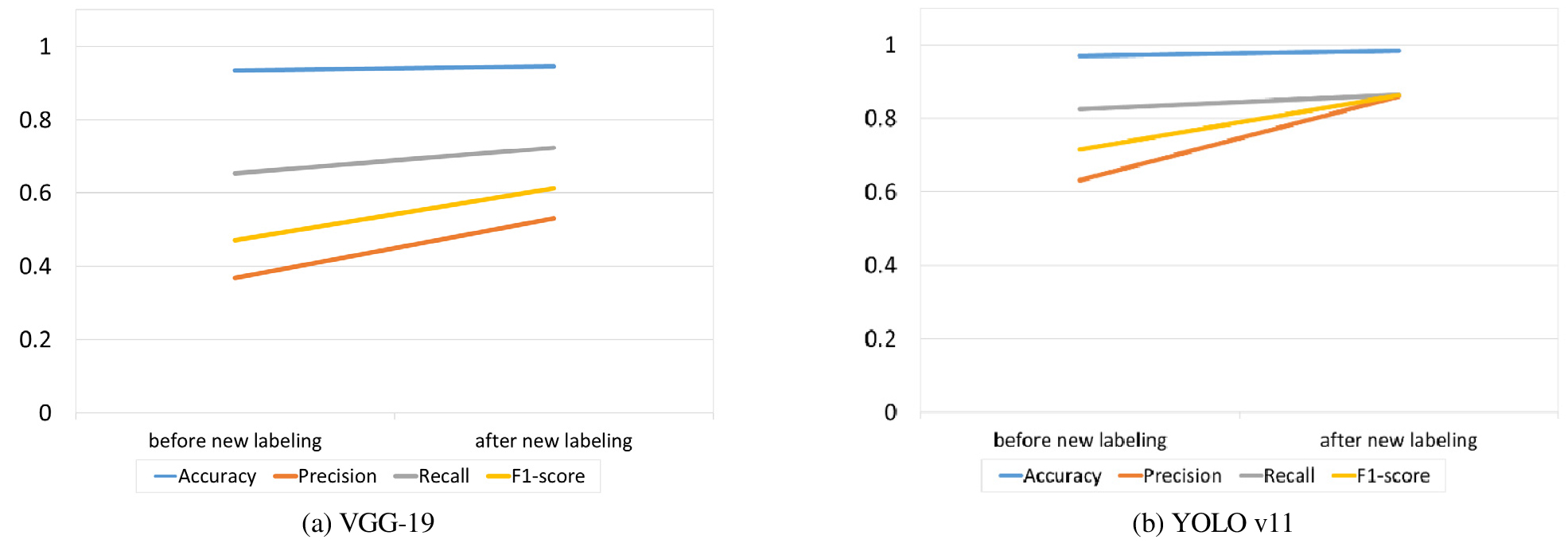
같은 현상이 VGG-19 모델 적용 결과 Fig. 7(a)에서도 동일한 시간대에서 관찰되며, 이는 전통적인 자료 처리 절차 적용 후 VGG-19 모델의 신호 탐지 결과인 Fig. 4의 모든 결과에서도 일관되게 나타나는 현상이다. 새로 탐지된 신호가 존재하는 위치를 포함하여 새로 정답 라벨링을 수행하여 각 모델의 성능을 다시 계산한 결과 VGG-19 모델의 경우 정확도 0.9468, 정밀도 0.5303, 재현율 0.7241, F1-score 0.6122로 미소지진 모니터링에 가장 적합하다고 판단했던 이상 트레이스 제거 단계의 수치와 유사하게 나타났으며, YOLO v11 모델의 경우 정확도 0.9840, 정밀도 0.8605, 재현율 0.8649, F1-score 0.8627로 카탈로그에 존재하는 신호만을 정답으로 라벨링한 결과보다 향상된 수치를 보였다(Fig. 8). 이러한 결과는 본 연구에서 개발한 기계학습 기반 신호 탐지 모델이 사람이 육안으로 식별하기 어려운 약한 신호나 복잡한 잡음에 가려져 드러나지 않는 신호도 효과적으로 탐지할 수 있는 능력을 가지고 있음을 보여준다. 이는 실제 지진 모니터링 현장에서 놓칠 수 있는 미소지진 이벤트들을 추가로 발견할 수 있는 가능성을 보여준다.
이를 통해 신호 탐지의 대상이 되는 잡음 수준에 따라 기계학습 모델을 통한 신호 탐지 성능이 달라지는 것을 확인하였다. DnCNN 기반 잡음 제거를 통해 VGG-19 및 YOLO v11 모델 모두 신호 탐지 성능이 향상되었으며, 특히 YOLO v11 모델을 활용한 신호 탐지에서 전통적인 자료 처리 기법들보다 우수한 탐지 정확도를 달성할 수 있음을 보여준다.
그러나 기계학습 기반 처리 기법을 실제 현장에 적용할 때 고려해야 할 사항이 있다. DnCNN을 포함한 딥러닝 기반의 잡음 제거는 우수한 성능을 보이지만 전통적인 기법보다 더 긴 처리 시간이 소요되어 실시간 모니터링의 핵심 요구사항과 상충되는 문제가 있다. 본 연구에서 사용한 15초 길이의 DnCNN 기반 잡음 제거가 수행된 테스트의 자료 처리 및 탐지에 34.4초(VGG-19)와 45.4초(YOLO v11)가 소요되어 준실시간 모니터링에는 제한적이다.
또한, YOLO v11 모델이 정밀도와 전반적인 성능에서 우수한 결과를 보였으나, 모델 학습을 위한 정답 자료 생성에 상당한 시간이 요구된다는 한계가 있다. VGG-19 모델에서 사용하는 단순히 신호의 유무를 판단하는 이진 분류 라벨과 달리, YOLO v11 모델은 미소지진 신호의 정확한 시작점과 끝점을 파악하여 바운딩 박스 형태로 라벨링해야 한다. 이는 자료 처리자의 수동 작업을 필요로 하며, 특히 미약한 미소 지진 신호의 경우 정확한 경계 설정이 어려워 대용량 자료 구축시 많은 시간과 비용이 소모될 수 있다. 실제로 본 연구에서 사용한 학습 자료의 바운딩 박스 라벨링에만 전체 자료 준비 과정의 50% 이상의 시간이 소요되었다.
따라서 실제 DAS 자료를 활용한 미소지진 모니터링 시스템 구축 시에는 모델의 탐지 성능 뿐만 아니라, 처리 시간, 정답 자료 준비의 용이성 등을 종합적으로 고려한 실용적인 접근이 필요하다. 특히 실시간에 가까운 모니터링을 구현하기 위해서는 전체 처리 과정에 소요되는 시간도 매우 중요한 고려사항이며, 기계학습 모델의 우수한 성능에도 불구하고 처리 시간이 자료 기록 시간을 크게 초과하는 경우 실시간 모니터링에 제약이 따른다. 뿐만 아니라 YOLO v11 모델과 같은 객체 탐지 모델의 경우 복잡한 라벨링 작업으로 인한 부담도 고려해야 한다. 이러한 한계점을 고려할 때 따라서 실제 모니터링 시스템 구축을 위해서는 연산 효율성이 높은 경량화된 기계학습 모델을 사용하거나, 전통적인 자료 처리 절차중에서도 높은 정확도를 확보할 수 있는 최적의 조합을 찾는 것이 준실시간 모니터링이 가능한 시스템을 구축하는 데 적합할 것으로 판단된다.
결 론
본 연구에서는 DAS 시스템을 활용한 준실시간 미소지진 모니터링 시스템 구축을 위해 효율적인 자료 처리 절차와 최적의 신호 탐지 모델을 찾고자 하였다. 전통적인 자료 처리 절차를 단계별로 적용하면서 각 단계가 신호 탐지 성능과 처리 시간에 미치는 영향을 정량적으로 분석하고, VGG-19와 YOLO v11 모델의 성능을 비교하여 실시간 모니터링이 가능한 수준의 자료 처리 방안을 제시하였다.
Utah FORGE 지열 발전 프로젝트에서 취득한 DAS 자료를 활용하여 두 기계학습 모델의 자료 처리 절차별 신호 탐지 성능을 분석한 결과, 전통적인 자료 처리 절차가 증가할수록 신호 탐지 정확도는 향상되지만 처리 시간도 함께 증가하는 상충관계를 확인하였다. 혼동 행렬을 통한 정량적 성능 평가에서 VGG-19 모델은 높은 재현율로 신호를 놓치지 않는 장점을 보였으나 오탐지로 인한 정밀도 저하가 나타났고, YOLO v11 모델은 높은 정밀도를 보였으나 일부 신호를 놓치는 한계가 있었다. F1-score를 통한 종합적 평가에서는 모니터링 목적과 요구사항에 따라 높은 재현율 또는 높은 정밀도 중 우선순위를 고려한 모델 선택이 필요함을 확인하였다. 또한 자료 처리에 따른 잡음 수준 개선에도 불구하고 예측 성능이 일관성 있게 향상되지는 않았는데, 불완전한 자료 처리, 학습 자료의 양과 질 등이 주된 요인인 것으로 추정된다.
잡음 억제 성능 개선에 따른 탐지 결과를 비교하기 위해 DnCNN 기반 잡음 제거 자료에 모델을 적용하였다. 그 결과, 두 모델 모두 신호 탐지 성능이 향상되었으며, 특히 YOLO v11 모델에서 전통적인 자료 처리 기법보다 향상된 탐지 정확도를 달성할 수 있음을 보여주었다. 그러나 딥러닝 기반 잡음 제거는 전통적인 기법보다 긴 처리 시간이 소요되어 실시간 모니터링의 핵심 요구사항과 상충되는 문제가 있었다. 또한 YOLO v11 모델은 전반적으로 우수한 결과와 성능을 보였으나, 바운딩 박스 형태의 정답 자료 생성에 상당한 시간이 요구된다는 한계가 있었다. 실제로 학습 자료의 바운딩 박스 라벨링에 상당한 시간이 필요하여 대용량 자료 구축 시 많은 시간과 비용이 필요함을 확인하였다.
본 연구는 기계학습 기반 신호 탐지 방법이 미소진동 신호를 효과적으로 탐지할 수 있음을 보였으며, 실제 DAS 자료를 활용한 미소지진 모니터링 시스템 구축 시에는 모델의 탐지 성능뿐만 아니라 처리 시간, 정답 자료 준비의 용이성 등을 종합적으로 고려한 실용적인 접근이 필요함을 확인하였다. 특히 본 연구에서 제시한 추론 시간 비교는 모델 연산 과정에 국한된 것으로, 실제 DAS 모니터링 환경에서는 자료 전송, 저장, 분할, 로딩 등의 과정에서 추가적인 지연이 발생할 수 있다. 따라서 DAS 자료 취득, 처리, 신호 탐지에 대한 전체 파이프라인에서의 필요 시간을 포괄적으로 고려하여야 미소진동 신호에 대한 유의미한 준실시간 탐지가 가능할 것이다. 이러한 점을 고려할 때, 실제 모니터링 시스템 구축을 위해서는 연산 효율성이 높은 경량화된 기계학습 모델을 사용하거나, 전통적인 자료 처리 절차 중에서도 높은 정확도를 확보할 수 있는 최적의 조합을 찾는 것이 필수적일 것으로 판단된다. 제안된 방법의 유효성이 Utah FORGE 현장 자료를 통해 검증되었지만, 다양한 지질 환경과 잡음 조건에서의 추가적인 검증이 필요하며, 실시간 처리를 위한 모델 경량화 및 최적화 연구가 필요할 것으로 보인다.
