

서 론
자료 획득 및 특성
자력계 신호 및 잡음분석
자료 처리
전처리
드론의 자세 및 자화 보정
보정 후 처리
결과 및 토의
회전행렬차이에 따른 보정결과 비교
보정법의 비교
맴돌이 전류(eddy current)에 의한 점성자화 영향
비행 속도에 따른 지자기이상 보정결과 비교
결 론
서 론
자력 탐사법은 비파괴 지구물리 탐사법 중 하나로 높은 효율성과 비교적 낮은 운영비용이라는 장점을 가지고 있어 지질조사 및 광물자원 탐사에서 개척조사용으로 널리 사용되고 있다. 특히 별도의 신호원이 필요하지 않아 육상, 해상, 항공, 그리고 인공위성 등 다양한 플랫폼에서 탐사가 가능하다는 장점이 있다(Choe and Dyment, 2020). 자력탐사에 사용되는 자력계는 일반적으로 스칼라 자력계와 벡터 자력계로 분류되는데, 스칼라 자력계는 0.01 nT 수준의 초 고정밀 총자기장 강도 측정이 가능하나 자기장 벡터 성분은 측정할 수 없다. 반면 플럭스게이트 자력계는 0.1 nT 수준의 정밀도로 자기장의 벡터 성분을 획득할 수 있으며, 양성자 세차 또는 오버하우저 자력계에 비하여 전자기 잡음에 대한 상대적 안정성으로 인해 항공기, 드론, 선박과 같은 이동체에서의 탐사에 매우 유용하다. 그러나 플랫폼의 강자성체와 레이더, 통신 장치 등 탑재 전자 시스템에서 발생하는 전자기 간섭으로 인해 해상도와 민감도가 제한되는 본질적인 한계를 갖는다(Nogi and Kaminuma, 1999; König, 2006; Choe et al., 2021).
최근 무인 시스템 기술의 발전은 지구물리 탐사 분야에 혁신적인 변화를 가져오고 있다. 특히 드론을 이용한 탐사는 기존 유인 항공탐사 대비 운영비용을 90% 이상 절감할 수 있을 뿐만 아니라, 접근이 어려운 지역이나 위험한 환경에서도 효율적인 탐사가 가능하다(Vagale et al., 2021). 기존 항공 자력 탐사는 넓은 지역을 효율적으로 탐사할 수 있으나, 150 m 이하의 저고도 비행이 어렵고 100 km/h 이상의 빠른 비행속도로 인해 공간해상도가 제한된다. 반면 드론 자력 탐사는 10 m 이하의 초저고도 비행이 가능하고 20-30 km/h의 저속 비행으로 고해상도 탐사가 가능하여, 정밀 탐사에 효과적인 대안으로 주목받고 있다. 하지만 드론에 탑재된 삼성분 플럭스게이트 자력계는 통신 장치, 전기 시스템, 항법 장비, 모터에서 발생하는 전자기 잡음과 비행 중 발생하는 진동 및 자세 변화로 인해 자료의 품질이 크게 저하될 수 있다.
이러한 플랫폼 자체의 자기장 간섭 및 전자기 잡음 문제를 해결하고 정밀한 자기장 벡터 성분을 얻기 위해서는 플럭스게이트 자력계에 대한 정밀한 보정이 필수적이다. 이동체 플랫폼에 설치된 플럭스게이트 자력계를 보정하는 연구는 선박 자력탐사를 위해 Isezaki (1986)로 부터 본격적으로 연구되었으며, 이후 다양한 플랫폼에서 해당 보정법을 향상시킨 방법들이 제시되어왔다(Seama, 19921); Korenaga, 1995; Bronner et al., 2013; Engels et al., 2008). 최근 드론 기술이 발전하고 지구물리탐사 분야에서의 활용성이 높아짐에 따라, 기존의 선박 및 인공위성 플랫폼에서의 자력계 보정 연구(Olsen, 2003) 등을 기반으로 드론 환경에 특화된 플럭스게이트 자력계 보정 및 활용 방안에 대한 연구가 활발히 이루어지고 있다(Munschy et al., 2007; Gavazzi et al., 2019).
본 연구는 드론 시스템의 주요 전자기 잡음원이 플럭스게이트 자력계에 미치는 영향을 정량적으로 분석하고, 기존에 개발된 선박 및 항공 플랫폼용 플럭스게이트 자력계 보정방법(Isezaki, 1986; Seama 1992; Olsen, 2003)의 비교분석을 통해 드론 플랫폼에 최적화된 자성보정법을 적용하여, 잡음 제거와 신호손실 최소화를 위한 신호처리 알고리즘을 제시한다. 이 연구결과는 다양한 분야에서 드론 기반 자력탐사 시스템의 실용화를 위한 기술적 기반을 제공할 것으로 기대된다.
자료 획득 및 특성
본 연구는 전라북도 고창군 심원면 일대에서 수행되었다(Fig. 1(b)). 측선은 지상기준 100 m에서 지형 고려 비행을 활용해 북서-남동방향으로 6 km의 자료를 획득하였으며, 드론자성보정을 위한 8자 회전비행은 자료를 수집한 고도와 동일한 높이(상대고도 100 m)에서 지상의 구조물이 없는 서로 다른 위치에서 총 2회 수행하였다. 탐사에 사용된 자력계는 Sensys MagDrone R3 플럭스게이트 자력계 시스템(Bad Sarrow, Germany)을 사용하였다(Fig. 2). 이 자력계 시스템은 두 개의 플럭스게이트 자력계로 구성되어 있으며, 높은 샘플링 주파수(최대 250 Hz)와 0.1 nT분해능으로 자료를 획득할 수 있다. 사용된 드론은 DJI M300RTK (Shenzen, China) 를 사용했으며 이 드론은 2.4 GHz, 5.8 GHz 대역의 주파수를 활용하여 안정적인 통신 환경을 제공하며, GNSS모듈이 탑재되어 있어 L1 주파수(1575.42 MHz)와 L2 주파수(1227.60 MHz)대역에서 수신한다. 기체의 기본 자세 정보인 roll, pitch, yaw는 내장된 3축 자이로스코프 및 가속도계로 구성된 관성 측정 장치(IMU)를 통해 실시간으로 측정된다. 이 중 방향각(yaw)은 GNSS 및 RTK 시스템의 데이터를 활용하여 추가적으로 보정되며, 이후 비전 시스템과 적외선 센서를 통해 주변 환경을 기반으로 한 오차 보정이 이루어진다. 이러한 3단계 센서 융합 과정을 통해 최종적으로 획득된 자세 정보는 roll 및 pitch의 경우 최대 ±0.025°, yaw의 경우 최대 ±0.08°의 정확도를 가진다.
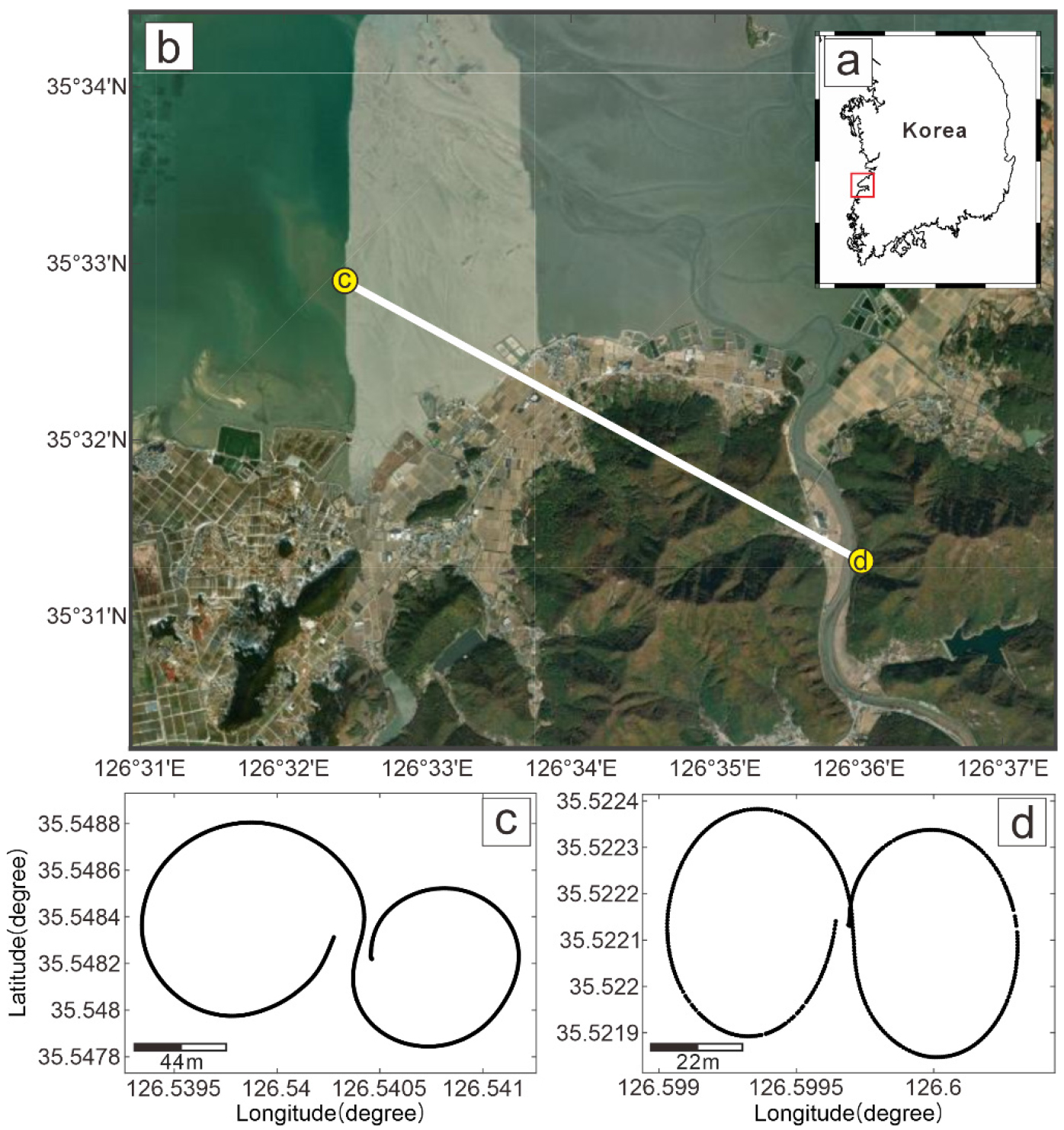
Fig. 1
Drone flight path. (a) Inset map of South Korea highlighting the study area (red box). (b) Satellite imagery showing the drone’s flight path. The white solid line shows the flight path. (c) and (d) represent the ‘figure-eight’ flight maneuvers performed at locations c and d, respectively, to collect data for the drone’s magnetic correction.
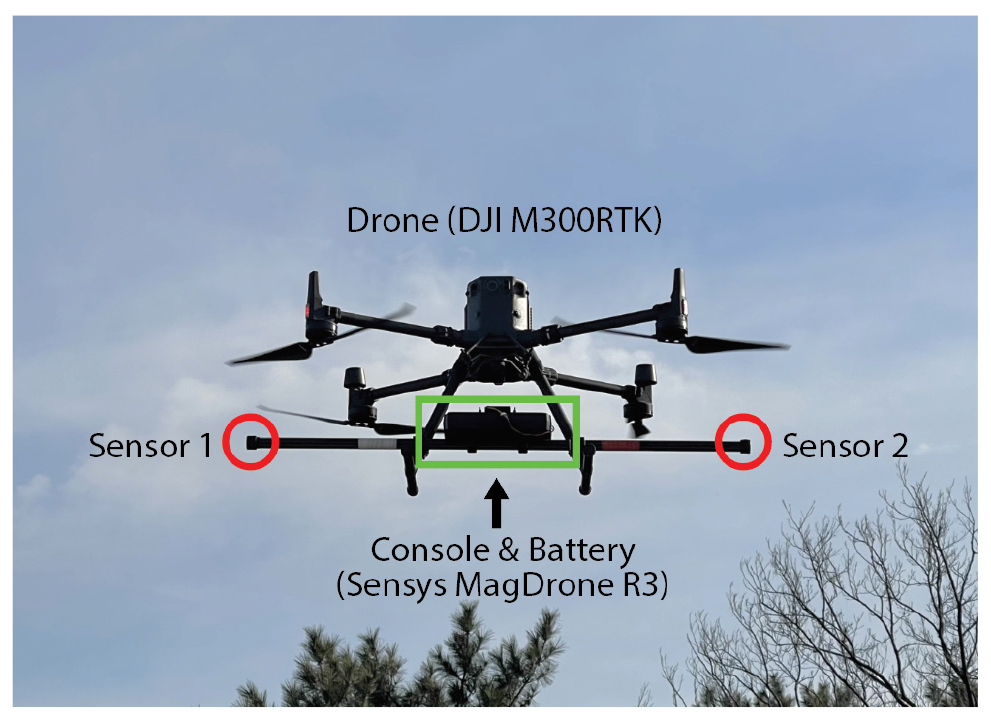
드론은 4개의 로터(rotter)가 고강도 탄소섬유로 본체와 연결되어 있으며, 본체의 중앙은 비행 제어 시스템, GNSS 모듈, 통신장비, 배터리 등 핵심 전자장치가 집약되어 있으며 이를 고강도 알루미늄 합금으로 보호하고 있다. 상자성의 알루미늄 합금 또는 탄소 섬유 프레임이 사용되어 드론의 자성의 영향이 적을 수 있지만, 여전히 모터, 배터리 등의 강자성 부품을 포함하고 있어 자성 보정이 필요하다.
플럭스게이트 센서는 모터, 배터리 등의 전자기 간섭을 최소화하기 위해 드론의 랜딩기어 끝단에 결합하였다(Fig. 2). 자료 수집은 250 Hz 샘플링 속도로 획득되었으며, 드론의 자세 및 위치 정보는 드론 자체에서 수집하는 GNSS와 IMU 센서를 통해 50 Hz의 속도로 기록되었다.
자력계 신호 및 잡음분석
두 자력 센서에서 수집된 원시 데이터에 대해 고속 푸리에 변환(FFT)을 적용하여 주파수 영역 분석을 수행한 결과, 드론의 좌측과 우측에 각각 등거리에 위치한 센서에 유사하지만 서로 다른 잡음원이 기록되는 것으로 확인되었다. 또한 두 센서 모두 60 Hz에서 현저한 피크를 보이는 인위적인 잡음 성분이 확인되었다(Fig. 3). 이 주파수는 우리가 일상생활에서 사용하는 상용 전력 주파수로, 드론 내부 전원 공급 시스템에서 발생하는 강한 전자기장이 자력 센서에 영향을 미친 것으로 판단되며, 주요 잡음 발생원으로는 모터, 영상 전송 시스템 등으로 추정할 수 있다. 이 외에도 다양한 주파수 대역에서 미미한 잡음이 발생하고 있으며, 이는 다양한 내부 전자 장비의 작동 또는 외부 전자기 환경 변화에 의한 복합적인 잡음발생이 기록된 것으로 보인다.
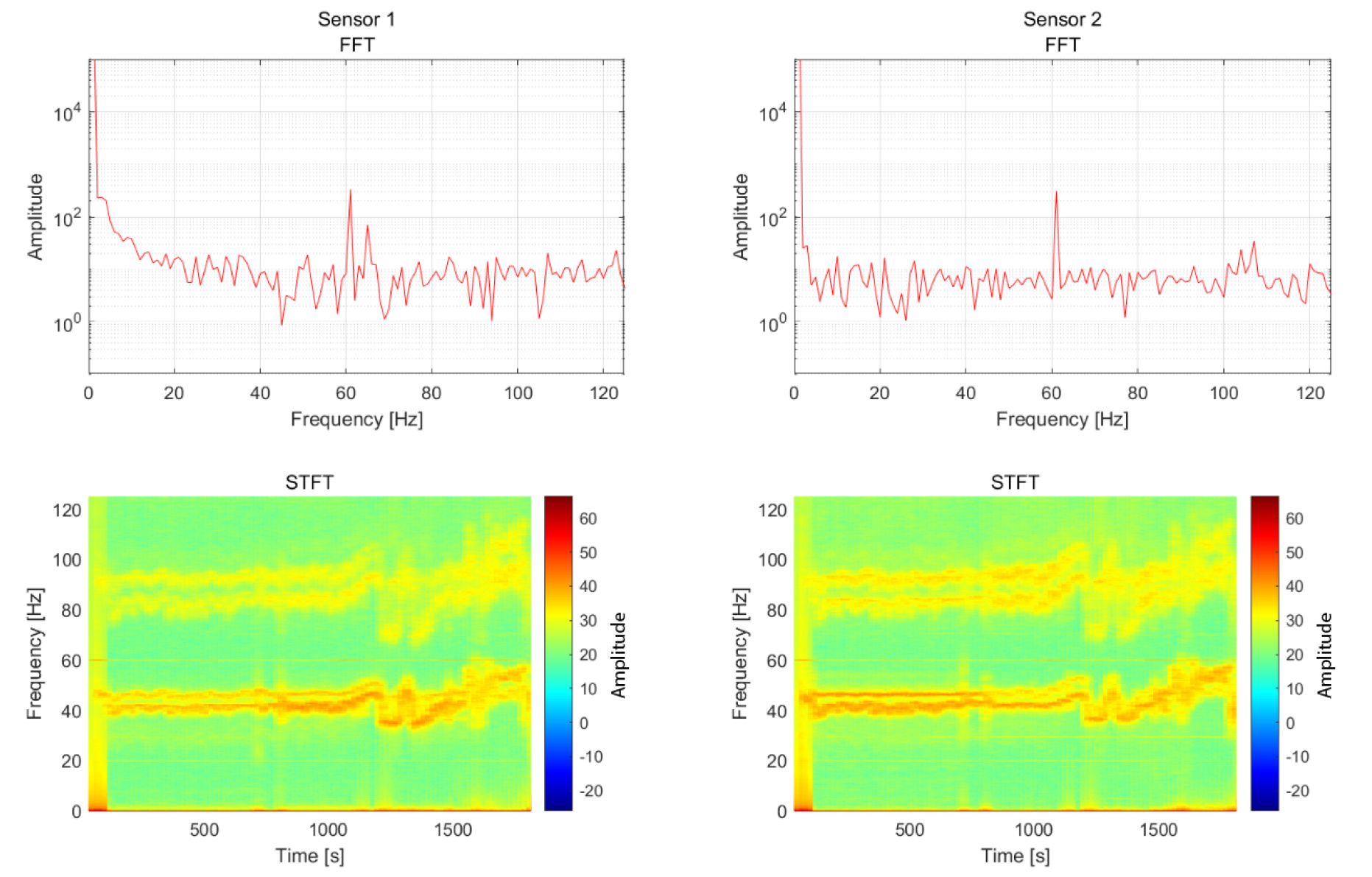
Fig. 3
Noise analysis of Sensor 1 and Sensor 2 during data collection. The top row shows the amplitude of the magnetic field as a function of frequency, obtained by taking the Fast Fourier Transform (FFT) of the measured data. The bottom row shows the Short Time Fourier Transform (STFT) of the same data, which shows how the frequency content of the signal changes over time.
자료 처리
앞서 언급한 바와 같이 드론 기반 삼축 플럭스게이트 자력계로 수집된 데이터는 전자기 잡음, 진동, 그리고 드론의 자세 변화와 같은 다양한 요인으로 인해 품질 저하가 발생할 수 있다. 이를 효과적으로 제거하고 드론의 자성을 보정하여 정확한 자력이상 자료를 보정하기 위하여 데이터 전처리, 자화 및 자세 보정, 후속 처리 및 해석 단계를 포함한 처리 과정을 최적화한 알고리즘을 바탕으로 자료처리를 수행하였다(Fig. 4).
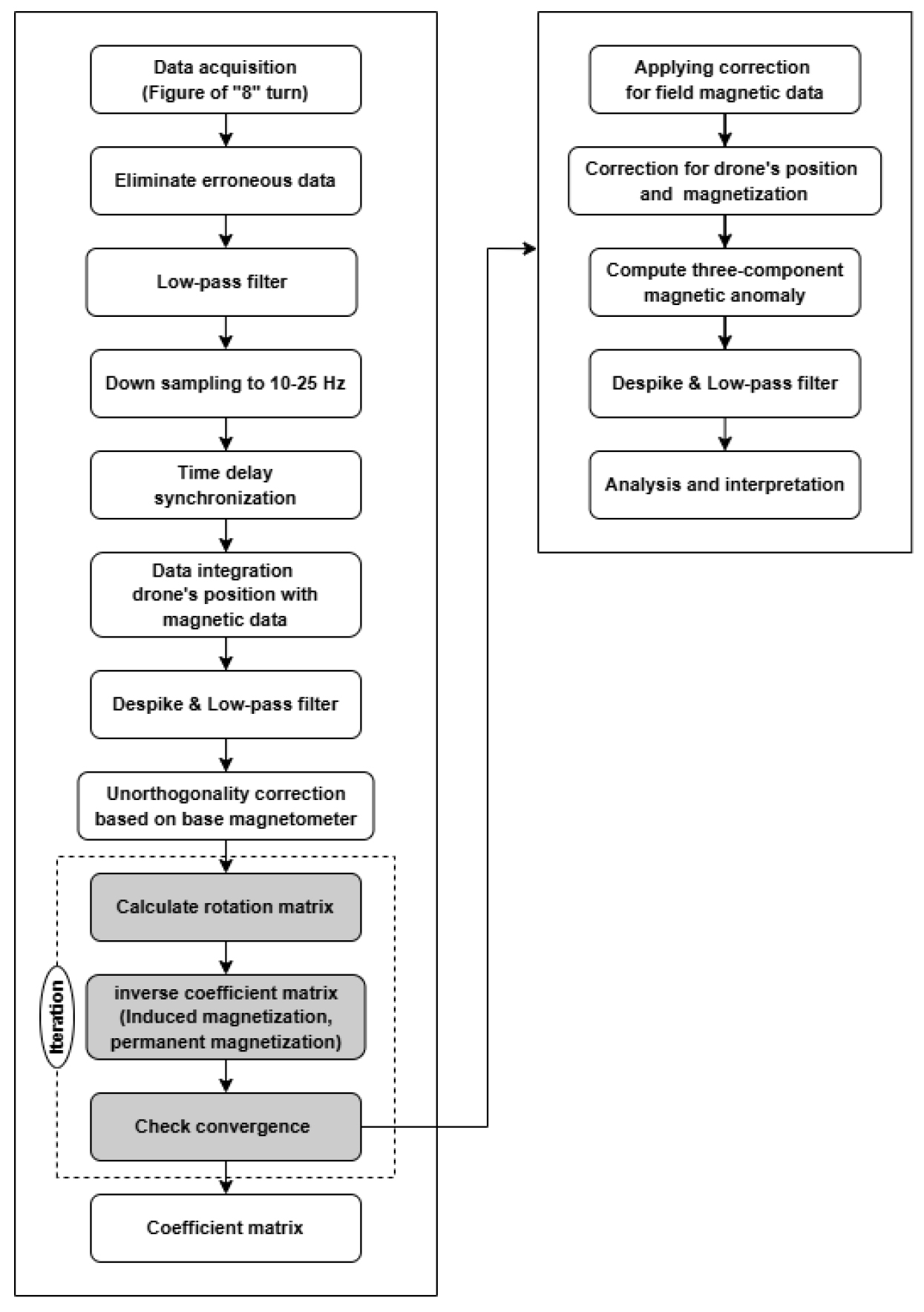
Fig. 4
Flowchart illustrating the algorithm for magnetic data processing and correction. The process includes data acquisition using a “figure-eight” drone flight pattern, initial data processing steps, magnetic field correction, and final analysis and interpretation of the magnetic anomalies. The iteration loop highlights the convergence check for the coefficient matrix.
전처리
우선 드론은 자화 보정을 위한 초기 데이터 수집을 위해 8자 회전 비행(상대고도 100 m, 총 2회)을 수행하여 자기장 자료를 획득하였다. 이 과정에서 발생한 신뢰도가 매우 낮은 자료는 임계값 기반 필터링으로 제거하여 분석 과정에서의 왜곡을 방지하였다. 탐사 수행 시 드론의 비행속도를 일반적으로 5-10 m/s (18-36 km/h)의 속도로 자료를 수집하기 때문에 250 Hz로 수집된 원시 데이터에 30 Hz 저역 통과 필터(low-pass filter)를 적용하여 고주파 잡음을 제거하였다. 이후 필터링된 자료는 드론의 저속 비행 특성(20-30 km/h)과 IMU (50 Hz), GNSS (10 Hz)간의 샘플링 속도 차이를 고려하여 10 Hz로 다운샘플링 하였으며, 교차상관 분석을 통해 자력계와 드론의 GNSS 타임스탬프(time stamp)를 일치시켜 시간 지연을 보정한 뒤 통합하였다.
드론의 자세 및 자화 보정
선박 및 비행체 등에 부착된 플럭스게이트 자력계는 삼성분 벡터 자료를 획득할 수 있다는 장점에도 불구하고 본체의 자기 특성 및 자세 변화에 큰 영향을 받는다(Korenaga, 1995). 이러한 자료의 보정을 위해 이동하는 물체에 탑재된 플럭스게이트 자력계의 자기 영향 보정을 위해 여러 방법이 제안되었다(Isezaki, 1986; Seama, 1992; Olsen et al., 2003).
먼저 드론이 가지고 있는 자성을 계산하기 위해서는 특수한 회전비행을 통한 자료획득이 필요하다. 일반적으로 드론의 롤(roll), 피치(pitch), 요(yaw)의 변화에 따른 드론자성의 변화를 측정하기위해 일정 반경으로 시계방향, 그리고 반시계 방향으로 8자회전을 한다(Isezaki, 1986). 우리는 측선자료를 얻기 전과 후 30 m 반경으로 1회, 25 m 반경으로 1회로 총 2회 보정회전자료를 수집하였다(Fig. 1(c)~1(d)).
자료수집 후 드론에 탑재된 플럭스게이트 자력계의 보정에 더 정확한 방법을 벤치마킹 하기 위해 세가지 보정방법과 자세보정 자료를 비교분석 하였다. 제안된 보정법의 방정식은 기본적으로 Isezaki (1986)에서 유래한다. 이 방정식은 센서 측정값()과 주변 자기장() 간의 직접적인 변환 관계를 설명한다.
여기서 A는 지구 자기장과 선박의 대자율 텐서의 합을 반영하는 3×3 변환 행렬이고, R은 롤, 피치, 요에 대한 회전 행렬을 나타낸다. 는 지구 자기장 3축 벡터 (3×1), 는 플랫폼의 영구 자화를 나타내는 3×1 벡터, 는 플랫폼의 점성자화이다. 이동체의 점성자화는 주로 플랫폼의 자세 변화에 따른 자기장 변화로 유도되는 와전류에 의해 생성된 자기장을 나타낸다. 점성자화는 일반적으로 약하고 자료 해석에 큰 영향을 미치지 않지만 플랫폼의 갑작스러운 자세변화 또는 수십일 간의 장기간 이동 중 지구자기장의 변화에 의해 발생할 수 있다(König, 2006; Choe et al., 2021; Choe and Seama, 2024). 사용된 드론은 전반적으로 상자성체인 탄소섬유, 플라스틱, 그리고 알루미늄 합금으로 구성되어 있어 점성자화항을 무시할 수 있다고 가정하여 위 방정식에서 항을 소거하여 식 (2)와 같이 단순화하였다.
이 방정식은 플랫폼의 자기 특성 및 자세 변화가 측정값에 어떻게 영향을 미치는지 직접적으로 나타낸다. 대자율 텐서 A는 각 방법론 별 접근 방식에 따라 다음과 같이 다르게 표현한다.
식 (3)의 대자율 텐서 A는 주축 성분(, , )과 비주축 성분 , , , , , 을 모두 사용한다. 주축 성분은 외부 자기장(예: 지구 자기장)과 동일한 좌표축 방향으로 유도되는 자화율을 의미한다. 반면, 비주축 성분은 특정 좌표축 방향으로 외부 자기장이 가해졌을 때, 다른 축 방향으로 자화가 유도하는 현상을 나타낸다. 이러한 비주축 성분은 물질이 나타내는 비틀림 또는 회전과 유사한 자기적 반응으로 일반적으로 나타나는 자기이방성(magnetic anisotropy)과 큰 관련이 있다. 일반적으로 연구선은 철제 선박이며 강자성물질로 이루어져 있다. 이러한 강자성 물질은 자기 이방성의 영향이 현저하므로 식 (3)에서 처럼 대자율 텐서 9개를 모두 사용한 것으로 여겨진다. 하지만 인공위성은 경량화 및 고강도의 특수소재(예: 탄소섬유, 또는 티타늄-알루미늄 특수합금)를 사용하는데(ESA, 2007), 이러한 소재들은 상자성 또는 반자성의 매우 낮은 대자율을 나타내며 자기이방성 또한 매우 작은 특성을 보인다(Ferré et al., 2004). 이러한 이유로 Olsen (2003)은 인공위성에 부착된 플럭스게이트 자력계 보정을 위해 식 (4)에서처럼 대자율텐서의 주축 성분만 사용한 것으로 여겨진다.
플랫폼의 위치변화는 일반적으로 GNSS를 이용하여 측정하며, 자세변화는 roll, pitch, yaw의 회전각을 이용하여 표현한다. 각각의 회전성분은 식 (5)와 같이 정의할 수 있으며, 회전행렬 차이에 따른 자세보정 결과는 Fig. 5에 나타내었다.
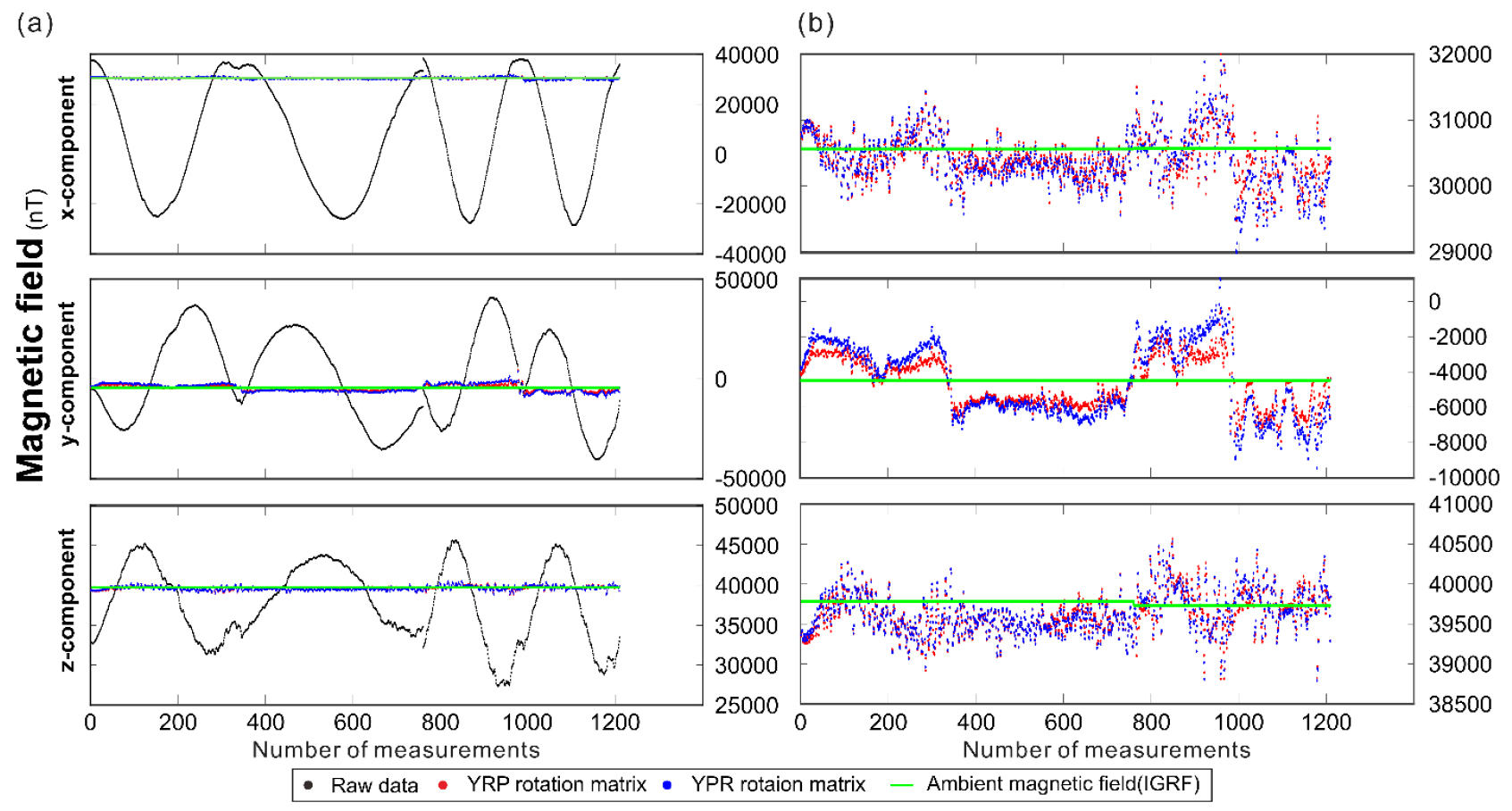
Fig. 5
Comparison of attitude correction results by rotation matrix orders (a) Raw magnetometer data (black solid line) are compared with data corrected using two different rotation matrix orders: the proposed sequence (red dots) and the conventional sequence (blue dots). (b) The results from both correction methods are compared with the International Geomagnetic Reference Field (IGRF) model (Alken et al., 2021; shown in green solid lines). The sequence more closely aligns with the IGRF reference field than the sequence.
Olsen (2003)은 식 (2)를 변형하여 대자율텐서의 주방향 과 축의 비직교성을 보정하기 위해 P 행렬을 추가하여 방정식 (2)를 아래와 같이 변형하였다.
여기서 비직교성 보정행렬은 다음과 같이 정의하였다.
이 비직교성 행렬은 드론에 장착한 자력계의 방향축(x, y, z)의 방향이 드론의 방향축과 일치하지 않아 비직교성을 보일 경우 보정할 때 사용된다. , , 은 각각 드론과 자력계 간의 비직교 각 오차를 나타낸다.
Isezaki (1986)과 Olsen (2003)은 각각 식 (3)과 (4)를 직접 최소자승법을 이용한 근사법을 이용하여 대자율 텐서 (A)와 영구자기장 벡터 ()를 추정하였다. Isezaki (1986)의 경우 대자율텐서의 9개 성분을 모두 고려하기 때문에 최소자승법을 통하여 대자율 텐서를 계산 시 행렬 는 대자율텐서와 비직교성 행렬의 곱과 같은 효과를 나타나게 된다. 따라서 비직교성 항을 따로 고려하지 않아도 보정과정에서 일부 비직교성이 보정된다.
Seama (1992)가 제안한 방식은 식 (2)의 변형된 형태이다.
여기서 는 이고, 는 를 나타낸다. 앞서 제시한 식 (2)와 (8)은 수학적으로는 동일하지만, 드론의 자세 데이터와 자력계 데이터에 잡음이 많이 존재하기 때문에 최소자승법을 이용한 보정법을 적용할 경우 전혀 다른 결과를 보여준다. 탐사자료는 시계열로 되어있어 정방 행렬이 아니므로 역행렬이 존재하지 않는다. 따라서, 최소 자승법을 위해 특이값 분해(SVD)를 통해 의사역행렬(pseudo inversion)을 사용하여 대자율텐서와 영구자화 벡터의 해를 아래와 같이 구하였다(Table 1). 다양한 보정방법을 적용한 8자 회전주행자료의 보정결과를 Fig. 6에 나타내었고, 배경자기장(IGRF-13)과 보정자료간의 차이를 확인하기 위해 히스토그램 분석을 수행하였다(Fig. 7).
Table 1
Drone magnetization coefficient matrices calculated from figure-eight maneuver data using Isezaki (1986), Seama (1992), and Olsen (2003) methods.
| Computed by Isezaki (1986) | |||
| 1.0255 | 0.0076 | 0.2323 | -8834.7 |
| -0.0092 | 0.9957 | -0.0226 | 1002.6 |
| -0.0132 | -0.0039 | 0.9657 | 1224.5 |
| Computed by Seama (1992) | |||
| 0.9717 | -0.0084 | -0.2350 | 8922.9 |
| 0.0099 | 1.0030 | 0.0267 | -1156.1 |
| 0.0129 | 0.0041 | 1.0295 | -1038.2 |
| Computed by Olsen (2003) | |||
| 0.9994 | 0 | 0 | -80.7300 |
| 0 | 1.0081 | 0 | 87.5000 |
| 0 | 0 | 1.0006 | -79.7100 |
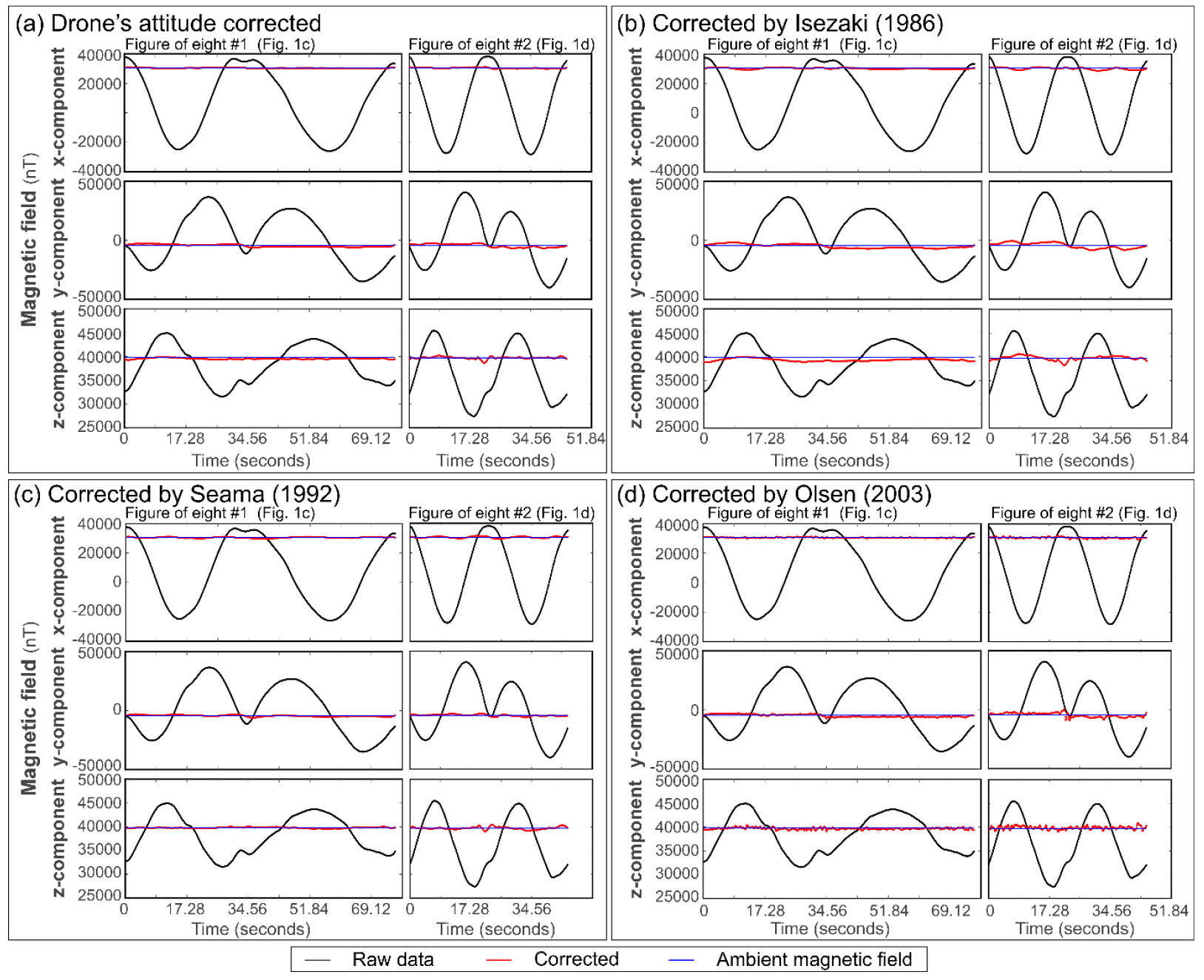
Fig. 6
Magnetic field data before and after correction using different methods. Vector components of magnetic anomalies (a) corrected for drone attitude, (b) corrected using Isezaki (1986) method, (c) corrected using Seama (1992) method, and (d) corrected using Olsen (2003) method. Each subplot shows the x, y, and z components of the magnetic field over time for two figure-eight flight maneuvers. Black solid lines indicate the raw data, red solid lines describe corrected data, and blue solid lines represent the reference magnetic field.
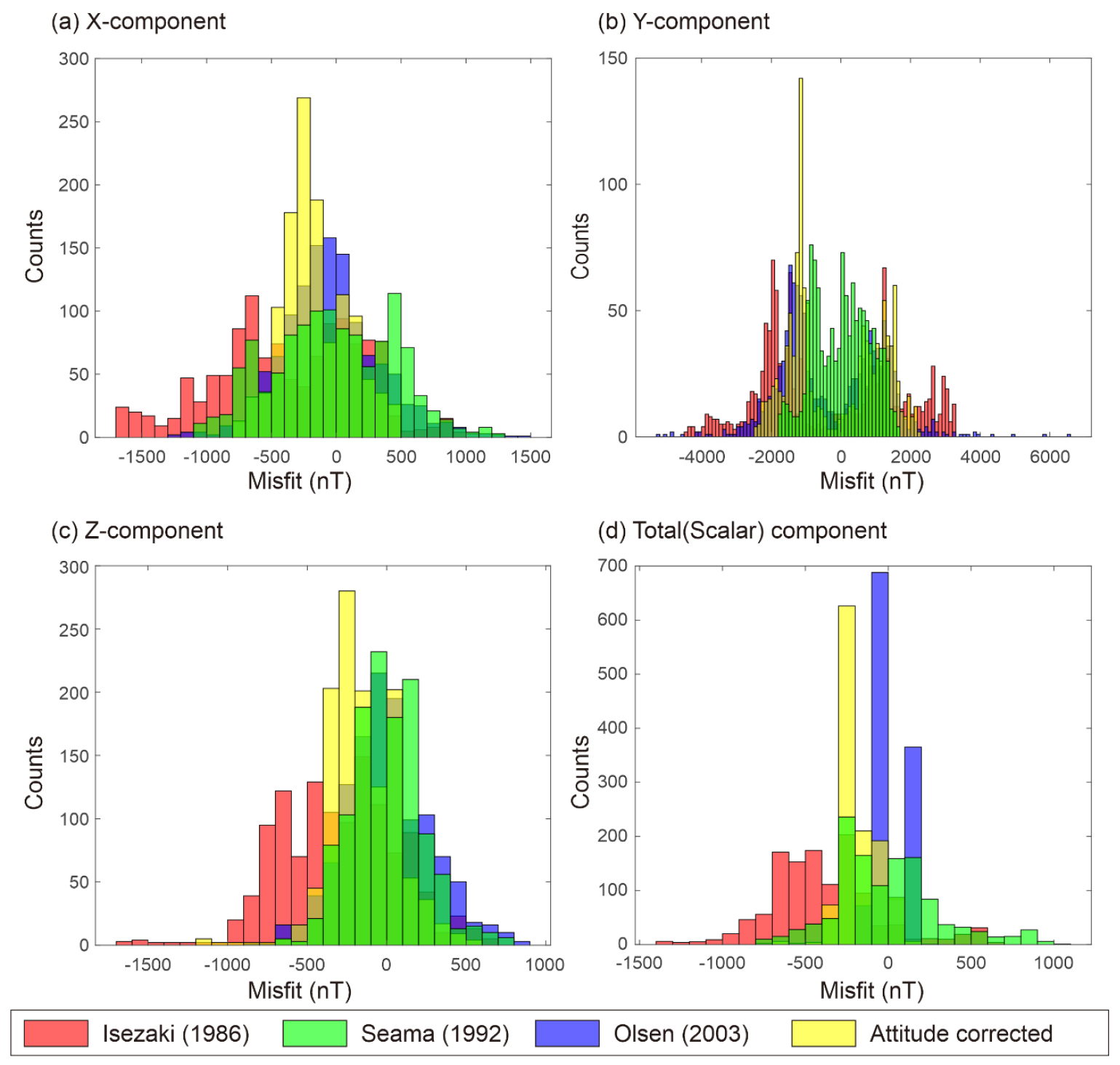
Fig. 7
Histograms showing the misfit between the corrected magnetic field data from figure-eight flight maneuvers and the background magnetic field. (a) X-component, (b) Y-component, (c) Z-component, and (d) Total (Scalar) component. The histograms illustrate the distribution of misfit values for different correction methods: Isezaki (1986), Seama (1992), Olsen (2003), and attitude correction. The vertical dashed line represents the mean misfit value. The bin width of each histogram is 100 nT.
보정 후 처리
드론의 자세 및 자화 보정 후에도 짧은 파장 잡음이 여전히 관찰되었다(Fig. 8). 이는 낮은 민감도를 보이는 플럭스게이트 센서의 고유한 기술적 특성과 보정되지 못한 모터의 전자기잡음과 기계적 진동 등의 영향으로 여겨진다. 이러한 잡음 성분은 저역통과 필터(Low-pass filter)를 이용해 효과적으로 제거할 수 있다. 먼저 자기장의 주요 추세에서 ±700 nT를 초과하는 스파이크 잡음을 제거하였다. 이어서 드론의 주행고도를 고려하여 0.5 km 이상의 파장을 허용하는 저역 통과 필터를 적용하여 짧은 파장 잡음을 효과적으로 제거하였다(red solid lines in Fig. 8). 이후 IGRF의 벡터 성분을 제거하여 각 벡터 성분에 대한 지구자기이상을 계산하였다(Fig. 8).
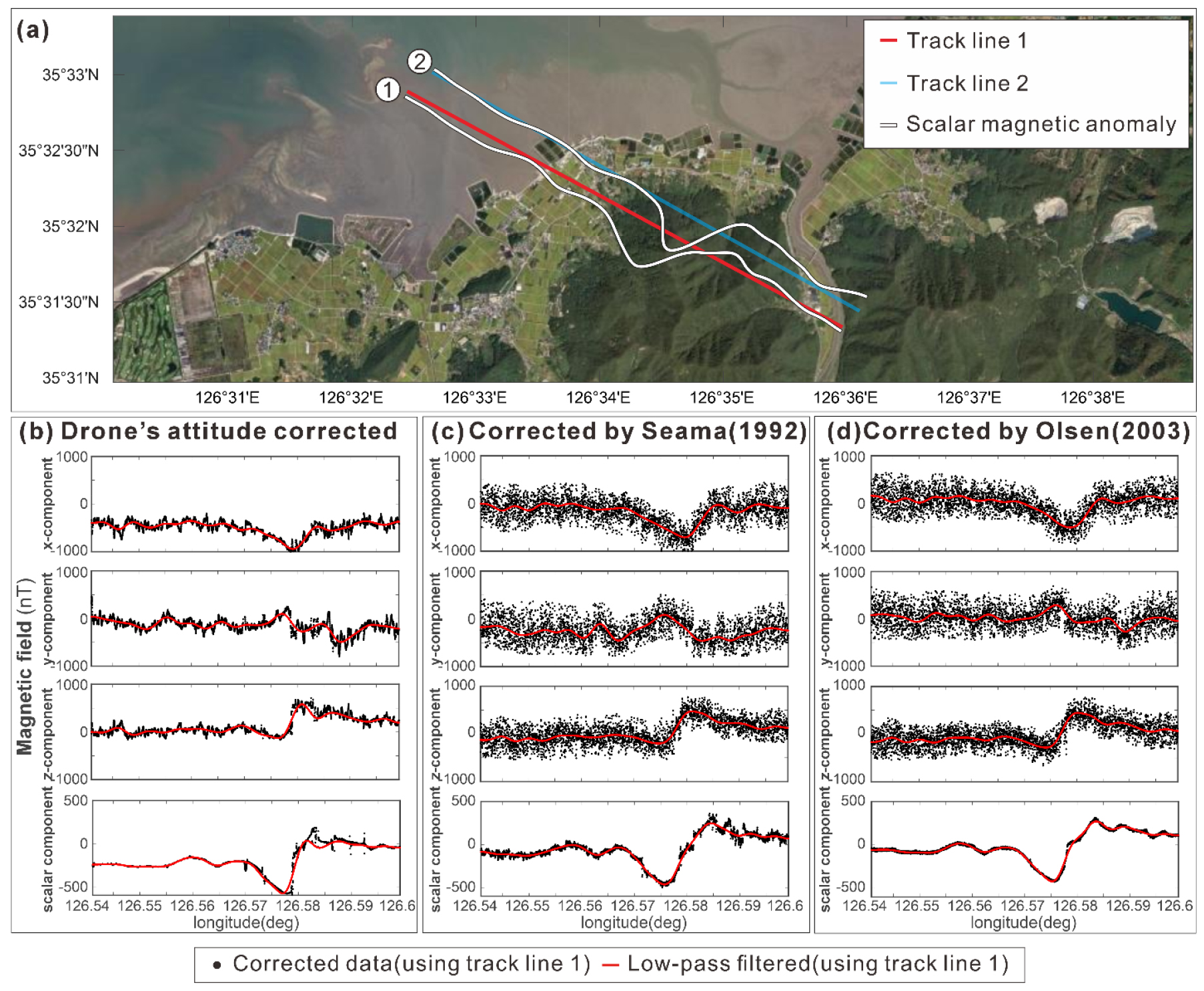
Fig. 8
Comparison of magnetic anomaly profiles after correction using different methods. (a) Track line 1 (red solid line) and 2 (blue solid line) with scalar magnetic anomaly data (white solid lines). Vector and scalar components of magnetic anomalies of trackline 1, (b) corrected only for the drone’s attitudes, (c) corrected using Seama (1992) method, and (d) corrected using Olsen (2003) method. Each subplot displays the x, y, and z components of the vector magnetic field, along with the scalar(total) magnetic field, plotted along the longitude. Black dots represent corrected results obtained by different methods, and red solid lines indicate the low-pass filtered anomalies.
결과 및 토의
회전행렬차이에 따른 보정결과 비교
3차원 회전행렬은 일반적으로 오일러 각(Euler angles)으로 표현되며, 행렬 곱의 교환법칙이 성립하지 않아 적용 순서에 따라 최종 결과가 달라지므로 주의해야 한다. 우리는 주로 사용되는 3차원 회전행렬 Yaw*Pitch*Roll (YPR, 식 (9))과 Yaw*Roll*Pitch (YRP, 식 (10))의 차이를 확인하기 위해 8자 회전 자료를 이용하였다. 이 과정에서 드론의 기울어진 자세를 원래의 기준 좌표계로 되돌리기 위해 각 회전 행렬의 역행렬을 적용하여 드론의 자세만 보정하고 그 결과를 비교하였다(Fig. 5). 여기서 , , 는 각각 드론의 자세변화에 의한 요(yaw), 피치(pitch), 롤(roll) 각도를 나타낸다.
일반적으로 드론 또는 항공기의 조종체계와 동일한 YPR회전행렬이 더 널리 사용되며, YRP는 상대적으로 사용빈도가 낮다. 드론의 자세 보정된 3성분 자기장과 배경자기장을 비교해본 결과, 두 회전행렬 모두 배경자기장에 잘 수렴하는 것으로 나타났다(Fig. 5(a)). 하지만 서로 다른 수렴형태를 나타내고 있으며, YPR에 비해 YRP로 보정된 자기장이 배경자기장과 더 잘 수렴하는 것을 확인하였다(Fig. 5(b)). 이는 상용 쿼드콥터(quadcopter) 드론의 일반적인 특성상 기체의 수평을 유지하려는 경향 때문에 Roll 각도의 변화폭이 매우 작게 유지되기 때문으로 해석된다. 따라서 Roll 각도 변화가 작은 드론의 경우, YRP 회전 순서를 사용하면 특정한 자세에서 두개의 회전축이 겹쳐 하나의 회전방향이 자유도를 잃게 되는 짐벌락(Gimbal Lock)의 발생 가능성을 최소화하여 Yaw와 Pitch 각도의 독립성을 더 효과적으로 확보할 수 있다. 이러한 이유로 YRP행렬을 사용하였을 때 더 안정적인 자세보정 결과가 나타난 것으로 판단된다.
보정법의 비교
자력계로 수집된 신호는 지구자기장과 플랫폼(드론) 자체 및 탑재 장비의 영구자화 및 유도자화 성분의 합으로 표현된다(식 (1)). 이상적인 보정은 유도자화를 나타내는 대자율 텐서의 주축 성분(, , )을 1에 가깝게 만들고 영구자화 벡터를 정확히 추정하는 것이다. 본 연구에서 비교한 세 가지 보정법(Isezaki, 1986; Seama, 1992; Olsen, 2003)을 적용한 결과, 모든 방법에서 보정상수 행렬의 주축 성분이 1에 근접하게 추정됨을 확인하였다(Table 1).
각 보정법의 실질적인 성능을 평가하기 위해 8자 회전(Figure-8 maneuver) 비행 데이터를 이용하여 보정을 수행하고 그 결과를 비교하였다(Fig. 6). 드론의 자세 변화만을 보정한 경우(Fig. 6(a))와 비교했을 때, 세 가지 보정법 모두 자기장 신호의 수렴성을 개선했지만, 특히 Olsen (2003) 방법이 배경 자기장(ambient magnetic field)에 가장 가깝게 수렴하는 결과를 보였다(Fig. 6(d)). 드론 몸체는 알루미늄 합금과 탄소섬유로 제작되어 자성이 매우 낮은 상자성체가 주를 이루고 있어 자기이방성이 매우 낮게 나타나는 것으로 판단된다. 따라서 대자율텐서의 주축 성분 보정만으로도 충분한 보정효과를 나타내는 것으로 보이며, 오히려 Isezaki (1986)과 Seama (1992)를 이용한 보정의 경우, 비주축 성분을 포함한 보정으로 과적합(overfitting)이 발생하여 잡음이 증가한 것으로 여겨진다.
보정법의 정량적 정확도를 평가하기 위해, 보정된 자기장 데이터와 IGRF-13 간의 잔차(residual)를 분석하였다(Fig. 7). 히스토그램 분석 결과, Seama (1992)와 Olsen (2003) 방법이 잔차가 0 nT를 중심으로 가장 대칭적인 정규분포 형태를 보이며 통계적으로 가장 우수한 보정 성능을 나타냈다. Seama (1992)의 방법으로 보정된 x, y, z삼성분이 배경자기장에 가장 잘 수렴하는 것으로 나타났고, 스칼라 자기장의 경우 Olsen (2003)의 방법이 배경자기장에 가장 잘 수렴하는 것으로 확인할 수 있다(Fig. 7). 반면, Isezaki (1986) 방법으로 보정된 데이터의 잔차 분포는 평균값이 0에서 벗어나거나 편차가 상대적으로 크게 나타났다.
드론 자세 보정만 적용한 경우와 세 가지 보정법을 적용한 결과를 비교했을 때, 자세 보정만으로도 상당한 수준의 오차가 개선되었음을 확인하였다. 이는 드론 자세 변화가 측정 자기장에 미치는 영향이 크다는 것을 의미한다. 전체 측선 비행 데이터에 대해 드론 자세 보정만 적용한 경우와 Seama (1992) 및 Olsen (2003) 보정법을 적용한 경우를 비교 분석하였다(Fig. (8)). Fig. 8(a)에서 빨간색 실선은 드론으로 탐사자료를 획득한 측선(track line) 1, 파란색 실선은 측선 1의 북쪽에서 측정한 측선 2, 흰색 실선은 스칼라 자기이상데이터를 나타낸다. Fig. 8(b)의 각 그래프에서 검은 점은 원시자료의 회전 및 자성이 보정된 자료이고, 빨간색 실선은 보정된 자료에 저주파통과필터(low-pass filter)가 적용된 것이다.
자세 보정만 적용한 경우(Fig. 8(b)), 각 성분(x, y, z) 및 스칼라 자기장이 수렴하는 듯 보이나, 드론 기체의 자화 효과가 보정되지 않아 자기이상 값에서 비연속적인 변화가 관찰되었다. Seama (1992) 보정법을 적용한 경우(Fig. 8(c)), 전반적으로 안정적인 신호 특성을 보이지만 스칼라 자기장에서 고주파 잡음 성분이 완전히 제거되지 않고 일부 존재하는 것을 확인하였다. 반면 Olsen (2003) 보정법의 적용결과(Fig. 8(d)), 스칼라 자력이상 보정에서 가장 안정적인 신호 특성을 확인할 수 있었고 고주파의 잡음 성분이 효과적으로 제거되어 연속적인 신호가 나타났다. Seama (1992)와 Olsen (2003)의 방법 모두 저주파통과필터를 적용한 후에는 안정적인 지자기 이상 분포를 확인할 수 있었으며, 이는 200 m가량 떨어진 위치에서 획득한 병렬 측선자료와 비교한 결과(Fig. 8(a)) 자기이상의 유사성을 보였다.
결론적으로 본 연구 환경에서는 Olsen (2003) 방법과 Seama (1992) 방법이 드론 기반 자력 탐사 데이터 보정에 있어 우수한 성능을 보이는 것으로 판단된다. 특히, 벡터 3성분의 경우 Seama (1992) 방법이 배경 자기장에 가장 잘 수렴하였고, 스칼라 자기장의 경우 Olsen (2003) 방법이 가장 우수한 수렴 결과를 보였다. Olsen (2003) 방법의 강점은 드론 자세 및 배경 자기장과 같이 상대적으로 안정적인 변수를 사용하고, 추가적으로 센서 축 간의 비직교성(non-orthogonality) 보정까지 포함하는 포괄적인 접근 방식에서 기인하는 것으로 사료된다. Seama (1992)의 방법 역시 안정적인 변수(드론 자세, 배경 자기장)를 활용하여 최소자승법과 특이값 분해(SVD)를 통해 대자율 텐서와 영구자화 벡터를 추정하므로, 특히 벡터 성분 보정에서 안정적인 결과를 제공하는 것으로 보인다. 반면, Isezaki (1986) 방법은 유사한 원리에서 출발했음에도 불구하고, 보정 대상인 드론 자세와 배경 자기장을 미지수로 간주하고, 보정 전의 불안정한 측정 자기장 자체를 관측값으로 직접 사용하여 이들 미지수를 함께 추정하려 하기 때문에 다른 두 방법에 비해 상대적으로 수렴성이 떨어지는 결과를 보인 것으로 해석된다.
맴돌이 전류(eddy current)에 의한 점성자화 영향
흥미롭게도, 모든 보정법에서 첫 번째 8자 회전(약 76초, 넓은 반경)의 보정 결과가 두 번째 회전(약 42초, 좁은 반경)보다 배경 자기장과 더 잘 일치하는 경향이 나타났다. 이는 두 번째 회전 시 더 빠른 속도와 급격한 기동이 맴돌이 전류(eddy current)에 의한 2차 자기장을 발생시켜 점성자화(Viscous Magnetization, VM)와 같은 거동이 관찰된 것으로 여겨진다.
점성 자화는 주로 강자성체(ferromagnetic) 플랫폼에서 잘 나타나지만(Choe et al., 2021; Choe and Seama, 2024), 드론과 같은 상자성체(paramagnetic) 플랫폼에서도 수 초에서 수 분에 걸쳐 자기장이 지연되는 현상으로 나타날 수 있다(Choi et al., 2025). 그러나 더 주요한 원인으로, 드론의 탄소 섬유 프레임이나 모터와 같은 전도성 부품이 지구 자기장 내에서 빠르게 자세를 바꾸면, 패러데이의 전자기 유도 법칙에 따라 맴돌이 전류가 발생한다. 이 맴돌이 전류가 만드는 2차 자기장이 자력계에 잡음으로 기록되었을 가능성이 높다. 따라서 안정적인 자력 탐사 데이터 확보를 위해서는 비행 시 회전 반경의 크기보다 드론의 급격한 자세 변화를 최소화하는 비행 계획 및 제어가 중요함을 알 수 있다.
비행 속도에 따른 지자기이상 보정결과 비교
드론은 비행속도에 따라 모터의 분당 회전수(RPM)을 변화시키는데 이러한 영향에 의해 자력계 데이터의 잡음 수준에 직접적인 영향을 줄 수 있다. 따라서 최적의 탐사 속도를 결정하고 자료의 신뢰도를 평가하기 위해 속도변화에 따른 보정 결과를 비교하였다.
이를 확인하기 위해, Olsen (2003)의 보정법을 동일하게 활용하여 탐사 수행 시 속도에 따른 자료의 질을 비교했다(Fig. 9). 자료는 5 m/s, 8 m/s, 10 m/s, 15 m/s의 속도로 Fig. 1의 주 측선과 동일한 측선을 따라 상대고도 100 m, 8자 회전 비행은 기존과 동일하게 2번씩 수행하였다.
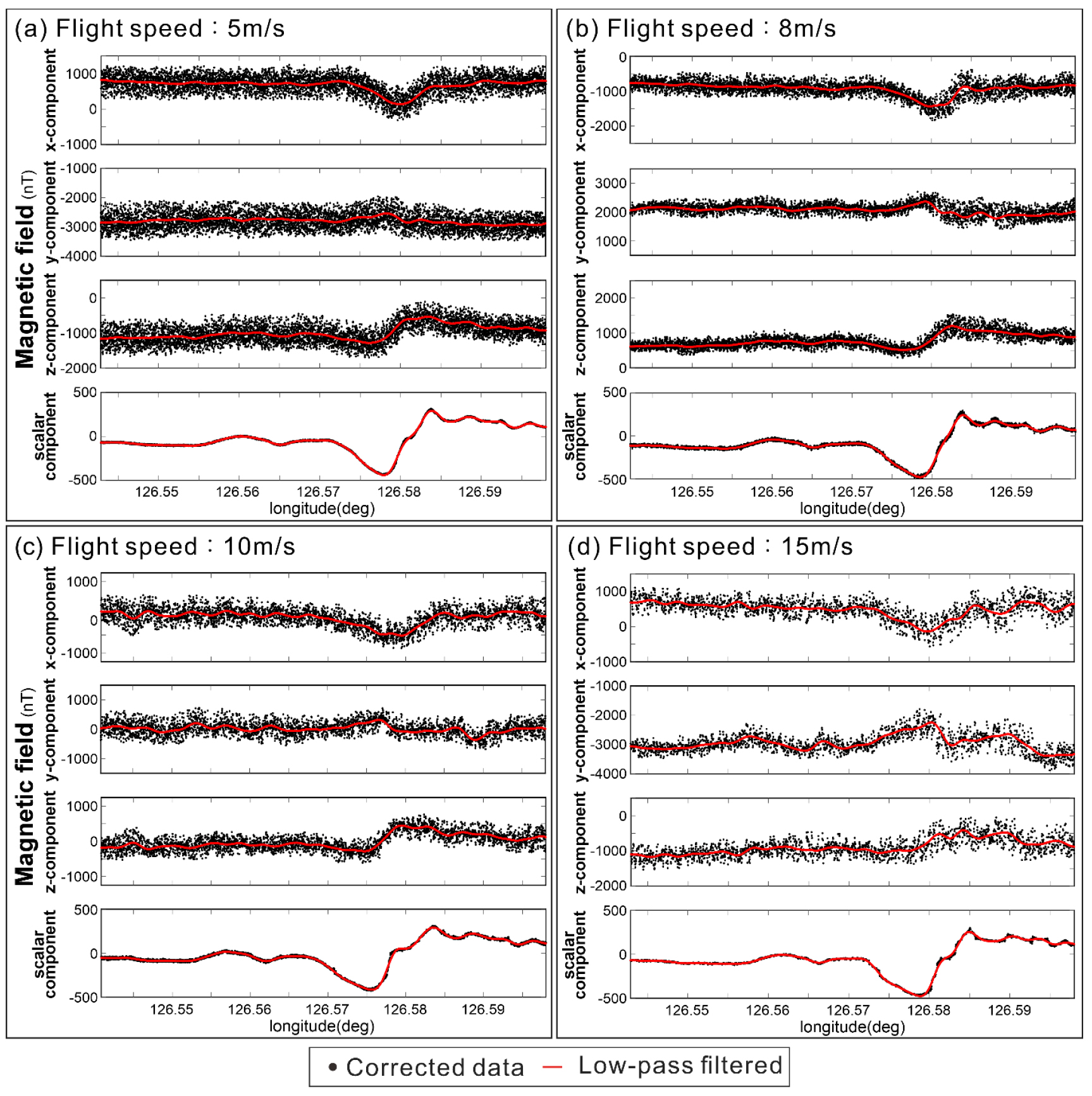
Fig. 9
Comparison of magnetic anomaly profile data according to different flight speeds. (a) Data acquired at a flight speed of 5 m/s. (b) Data acquired at a flight speed of 8 m/s. (c) Data acquired at a flight speed of 10 m/s. (d) Data acquired at a flight speed of 15 m/s. Each subplot displays the x, y, z, and scalar (total) components of the magnetic field. Black dots indicate corrected data, and red solid lines describe low-pass filtered data.
각 속도별 지자기이상을 보정한 결과, 전반적인 지자기이상의 양상은 동일했으나, 전자기 잡음이 비행 속도에 따라 다르게 나타나는 것을 확인하였다. 비행 속도가 높아질수록 잡음의 영향이 커지는 것을 명확히 확인할 수 있었다. 구체적으로 10 m/s 이하의 속도 구간에서는 안정적인 비행 자세와 충분한 데이터 샘플링 밀도가 확보되어 신호 왜곡 없이 자기이상을 분석할 수 있었으며, 특히 5 m/s의 저속 비행 조건(Fig. 9(a))에서 가장 안정적인 신호 특성을 보였다.
한편, 15 m/s 속도 획득한 자료의 경우 잡음이 크게 증가하여 자료의 질에 큰 영향을 미치는 것으로 확인되었다. 이는 (1) 단위 거리당 취득하는 자료의 샘플 수가 감소하여 공간 해상도(spatial resolution)가 저하되었고, (2) 높아진 모터 RPM과 더불어 바람의 저항에 대응하기 위한 급격한 자세 제어는 각 모터에 불규칙한 전류공급하게 된다. 이러한 요인들은 예측하기 어려운 고주파 전자기 잡음을 발생시켜 신호 대 잡음비(Signal Noise Ratio)를 크게 악화시킨다. 결과적으로, 저하된 공간 해상도와 악화된 SNR은 보정 알고리즘이 실제 자기이상 신호와 잡음을 명확히 구분하지 못하게 만들어, 최종 보정 결과의 신뢰도를 크게 떨어뜨리는 핵심 원인으로 분석된다. 본 연구 결과는 특정 장비(DJI M300RTK, Sensys MagDrone R3)와 비행 환경 조건에서 나타난 것으로, 다른 드론 시스템이나 탐사 지역에 일반화하여 적용하기 위해서는 추가적인 검증이 필요할 것으로 여겨진다. 또한, 최적 보정법 적용 후에도 잔존하는 고주파 잡음은 드론 모터 작동이나 자세 제어 시스템 등에서 발생하는 전자기 간섭의 영향으로 추정되며, 향후 다양한 비행 조건, 로터 회전 수 변화 등을 고려한 정밀한 잡음 모델링 및 보정 기법 개발이 요구된다.
현재 자기이상 해석은 주로 스칼라 데이터를 기반으로 발전해왔다. 스칼라 자력계는 구조가 간단하고 고해상도 데이터 취득이 용이하여 널리 사용되어 왔기 때문이다. 반면, 벡터 자력계는 본질적으로 더 많은 정보(자기장의 방향과 크기)를 제공하고 플랫폼에 직접 탑재 가능한 장점이 있음에도 불구하고, 측정된 벡터 데이터를 스칼라 값으로 변환하여 사용하는 경우가 많아 그 활용도가 제한적이었다. 본 연구에서 제시된 바와 같이 벡터 데이터의 품질을 향상시키는 보정 기술의 발전과 더불어, 향후 벡터 자기이상 자료를 직접 활용하는 해석 기법이 진보한다면 다양한 지구과학 및 공학 분야에서 벡터 자력계의 활용 가치가 크게 높아질 것으로 기대된다.
결 론
본 연구는 드론 기반 삼축 플럭스게이트 자력계 시스템의 잡음 제거 및 자성 보정을 위한 최적화된 자료처리 알고리즘을 제시하고, 현재까지 제안된 세 가지 보정법과 자세 보정 결과를 다른 배열의 회전행렬 사용과 속도변화에 따라 비교·평가하였다. 드론 시스템의 주요 잡음원은 60 Hz 전력 주파수 성분으로 확인되었으며, 이는 전원 공급 시스템, 모터, 영상 전송 장치 등에서 발생하는 전자기장의 영향으로 판단된다. 30 Hz 저역 통과 필터 및 10 Hz 다운샘플링은 드론의 비행 속도와 센서 특성을 고려할 때 효과적인 전처리 기법으로 평가되었다.
보정 알고리즘 비교 결과, 스칼라 자력이상 보정에는 Olsen (2003) 방법이, 벡터자력이상 보정에는 Seama (1992)방법이 우수한 보정 결과를 보였으며, 회전 반경과 회전 속도 및 비행 속도에 따라 보정 결과의 차이가 발생함을 확인하였다. 특히 급격한 자세 변화는 점성자화로 인해 보정 정확도를 저하시킬 수 있으므로, 완만한 비행이 안정적인 자력 데이터 획득에 유리한 것으로 분석되었다.
드론 기반 자력 탐사 기법은 넓은 지역을 짧은 시간 내에 고해상도로 탐사할 수 있는 효율적인 수단으로, 지질 구조 해석, 광물 자원 탐사, 고고학적 조사, 환경 모니터링 등 다양한 분야에 활용될 수 있다. 이러한 활용성을 고려하였을 때, 본 연구에서 제안한 보정 알고리즘은 드론 자력탐사 시스템의 실용화를 위한 기반 기술로 활용 가능할 것으로 기대된다.
향후, 각 방법의 장점을 결합한 하이브리드(Hybrid) 알고리즘을 개발하여 적용한다면, 하나의 통합된 프로세스 내에서 스칼라 보정의 안정성과 벡터 보정의 정밀도를 모두 확보할 수 있을 것이며, 이는 보정의 전반적인 정확도와 신뢰도를 한 단계 높이는 방안이 될 것이다.
