

서 론
선상 품질관리 시스템 구축 및 구성
품질관리 시스템 활용 잡음원 관측 사례
너울잡음(swell noise)
스트리머 굴절(bending)에 의한 잡음
선박잡음(ship noise)
스트러밍 잡음(strumming noise)
탄성파 간섭(seismic interference, SI)
자연 지진(earthquake)
크로스피드 잡음
스파이크 잡음
스트리머 부착형 장비에 의한 잡음
공기 누출(air-leakage)
후속 자료처리에서의 품질관리 기록 활용
결 론
서 론
해양 탄성파 탐사는 해저 지질 구조 규명, 천연자원 탐사, 이산화탄소 저장소 후보지 탐사 등 다양한 분야에서 널리 활용되고 있다. 해양 탄성파 탐사 중에는 다양한 형태의 환경 변화, 장비 이상, 탐사 조건 변화 등이 수시로 발생할 수 있다. 따라서 탐사 중 다양한 원인의 잡음이 기록될 수 있으며, 이러한 잡음은 그 발생 원인에 따라 배경잡음(너울, 주변 선박, 탄성파 간섭 등), 소스 기인 잡음(블랜딩 등), 그리고 장비 잡음(스파이크 잡음, 공기 누출 등)으로 구분된다(Olhovich, 1964; Fulton, 1985; Elboth et al., 2010; Dondurur, 2018; Tziavos et al., 2019; Hlebnikov et al., 2021).
선상 품질관리(Quality Control, QC) 체계의 필요성은 두 가지 측면에서 강조된다. 첫째, 해양 탄성파 탐사 과정에서 수집되는 자료의 품질은 최종 해석 결과에 직접적인 영향을 미친다. 탐사 단계에서 발생하는 잡음은 기원에 따라 고유한 특성을 가진다. 따라서 탄성파 자료처리 시에는 잡음의 특성에 맞춘 적절한 감쇄 처리가 이루어져야 한다. 이를 위해 선상에서는 취득 단계에서 발생하는 잡음을 특정하고 분류하여, 후속 단계에서 신속하게 최적의 잡음 감쇄가 가능하도록 해야 한다(Pajot et al., 1992). 둘째, 실시간 품질관리 체계는 탐사 과정 중 발생하는 추가 비용을 최소화하는 데 기여한다. 장비 이상 등으로 인한 심각한 잡음 발생을 조기에 감지하고, 이에 적절히 대응함으로써 추가적인 자료 재취득을 줄이고 탐사 효율성을 높일 수 있다.
스트리머 탐사에서는 취득 자료 품질을 점검하기 위해 다양한 품질관리 모듈이 적용된다. 품질관리는 탐사 과정 중 수신기 잡음, 장비 결함, 자료 수집 오류를 조기에 발견하여 즉각적인 대응을 가능하게 하는 실시간 품질관리(online QC)와 개별 탐사 라인 종료 후 이상 여부를 평가하는 오프라인 품질관리(offline QC)로 구분된다. 실시간 품질관리에는 개별 발파자료를 실시간으로 확인하는 음원모음(shot gather) 모니터링과, 근거리 수신 신호를 중심으로 품질을 평가하는 근거리 트레이스 모음(near-trace gather) 모니터링이 수행된다. 이 때, 수신기 주변 잡음을 평가하기 위해 실시간 RMS (root-mean-square) 분석이 병행된다(Park et al., 1999; Koo et al., 2008). 또한, 에어건 배열의 장비 이상 여부를 감지하기 위한 근접 수중음향(Near-Field Hydrophone, NFH) 신호 모니터링과 스트리머의 이상 상태를 평가하는 크로스피드 중합(cross-feed stack) 모니터링도 함께 이루어져야 한다(Wei et al., 2016).
한편, 오프라인 품질관리에서는 탐사 라인 종료 후 저급중합(brute stack)을 제작하여 전체 반사 신호의 연속성과 품질을 평가하고(Koo et al., 2008), 항측(navigation) 자료와 탄성파 자료를 결합하여 수신기 위치 및 수심과 폴드(fold) 분포 등을 검토할 수 있다.
한국지질자원연구원은 2024년 5월, 6,900톤급 신규 물리탐사연구선 ‘탐해3호’를 공식 취항시키고, 선상 품질관리 시스템의 구축 및 고도화를 추진하고 있다. 이 논문에서는 탐해3호에 구축된 선상 품질관리 시스템을 소개하고, 스트리머 탐사 사례를 중심으로 국내외 해역에서 관측된 다양한 잡음원의 유형과 특성을 공유하고자 한다.
선상 품질관리 시스템 구축 및 구성
탐해3호는 6,900톤급, 약 92 m 길이의 물리탐사 연구선으로, 대륙붕, 대양, 극지 등 전 세계 해양 탄성파 탐사 및 해저 지질 연구를 수행할 수 있도록 설계되었다. 본 선박은 최대 약 12 km 스트리머를 활용한 2차원 탐사와 약 6 km 스트리머 8조를 활용한 상용급 3차원 탐사가 가능하다. 여섯 개의 에어건 배열을 갖추어 최대 약 6,900 in3의 음원 출력을 제공한다. 탐사 중 취득되는 자료는 안정성을 위해 이중화된 백업 체계로 저장되며, 저장된 자료는 실시간으로 품질관리 시스템을 통해 확인할 수 있다. 이에 2024년 5월부터 2025년 10월까지 탐해3호에 설치된 채널 간격 12.5 m스트리머를 활용하여 다섯 차례의 2차원 탐사와 세 차례의 3차원 탐사가 국내외 해역에서 수행되었다. 이러한 일반 스트리머 탐사 외에도 고해상 스트리머(채널 간격 3.125 m, 샘플링 간격 최대 0.125 ms) 활용 탐사 3회, 해저면 노드 탐사가 2회 수행되었다. 다만 이 논문에서는 채널 간격 12.5 m의 일반 스트리머 탐사 사례만을 중심으로 기술하였다.
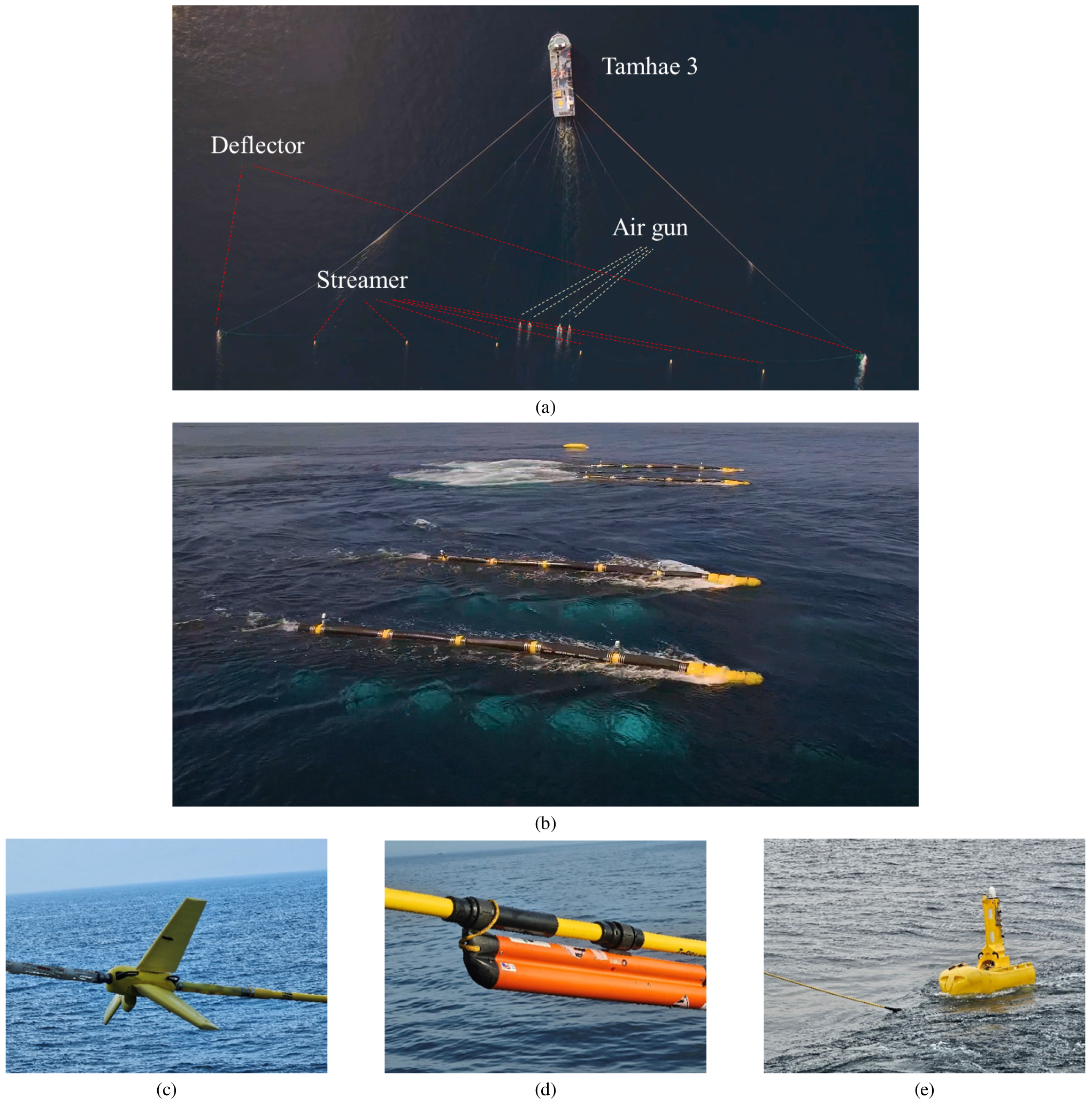
탐해3호의 스트리머 탐사 시스템은 에어건 배열, 스트리머 및 스트리머 부착형 장비, 항측 및 기록 시스템으로 구성된다. Fig. 1은 탐사 시스템의 이해를 돕기 위한 장비 사진이다. Fig. 1(a)와 같이 에어건 배열과 스트리머 장비를 견인하며 탐사가 진행된다. 3차원 탐사의 경우 스트리머 간 간격 유지를 위해 디플렉터(deflector)가 사용된다. Fig. 1(b)와 같이 에어건 배열은 여러 개의 클러스터로 구성되어 있으며, NFH는 각 클러스터 인근에 설치되어 발파 파형과 버블 주기(bubble period)를 실시간으로 모니터링하는 역할을 수행한다. 스트리머는 12.5 m 채널 간격으로 12채널 단위의 섹션으로 구성되고 섹션 4~6개마다 설치된 라인 수집 유닛(Line Acquisition Unit Marine, LAUM)을 통해 전력 공급과 신호 집계·전송이 이루어진다. 스트리머에는 NSN (Nautilus Streamer Node) (Fig. 1(c)), HSRD (Heading Sensor Recovery Device) (Fig. 1(d))와 같은 부착형 장비가 일정 간격으로 설치되어 수심과 방향 제어, 항측 정보 제공에 기여한다. Fig. 1(e)는 테일부이(tail buoy)로 스트리머 최끝단에 위치하며 rGPS 장비를 포함하고 있어 실시간으로 스트리머 위치 정보를 제공한다. 이러한 장비 구성과 운용 방식은 후속 절에서 기술하는 스트러밍 잡음, 스파이크 잡음, 크로스피드 잡음, 부착형 장비 기인 잡음, 공기 누출 등의 잡음 특성과 밀접한 관련이 있다.
스트리머 탐사 중에는 발파 중 배경잡음 및 장비의 이상유무를 실시간 품질관리 했다. 각 라인 종료 후에는 항측 자료, 중합 자료 등을 오프라인 품질관리 모듈로 점검하였다.
실시간 품질관리의 일환으로 각 발파 시점마다 음원모음을 모니터링했다. 음원 모음에서는 육안으로 확인할 수 있는 잡음, 자료 누락 등 이상 여부를 확인한다. 이때 자료는 원시자료의 잡음 특성을 최대한 보존하기 위해 3 Hz의 약한 낮은 진동수 차단 필터(low-cut filter)만을 적용하였다. 또한 잡음의 시각화를 돕기 위해 시간지수 보정을 적용했으며, 이 논문에서는 지수 1.0~1.5의 값이 사용됐다.
다음으로 각 발파점마다 실시간으로 업데이트되는 근거리 트레이스 모음 시각화 모듈을 구축했다. 근거리 트레이스 모음에서는 해수면 반응 및 반사면 구조의 대략적인 파악이 가능하며, 배경잡음의 영향을 직관적으로 확인할 수 있다.
또한 실시간으로 수신기별 잡음 수준의 변화를 관측하기 위해 수신기별 RMS를 시각화했으며, 발파점마다 실시간 업데이트 했다. RMS 진폭 분석은 개별 수신기에서 기록된 트레이스 중 발파 직후 혹은 기록 시간의 최하부 구간에서 계산된다. 예를 들어, 수심이 낮은 국내 해역의 경우 전체 기록 시간이 8,000 ms인 경우, 최하단 500 ms 구간(7,500~8,000 ms)를 RMS 계산 구간으로 설정했다. 반면 수심이 깊은 태평양 지역에서는 최상단 500 ms 구간(0~500 ms)를 RMS 계산 구간으로 설정해 운용했다. 한편 경우에 따라서는 최상단/최하단 구간의 RMS를 동시 도시하거나 타겟 심도 및 속도를 이용하여 타겟 이벤트의 RMS를 함께 확인하기도 하였다.
크로스피드 중합 역시 각 발파점에서 실시간으로 업데이트 되었다. 크로스피드 중합은 개별 스트리머 내의 모든 채널 신호를 단순 중합하여 도시하는 방식으로 계산된다. 이는 채널 간 신호가 비정상적으로 간섭되는 크로스피드 잡음이나 스파이크 잡음을 탐지하는데 활용되었다.
마지막으로 송신원의 품질 관리를 위해 NFH 원시자료를 실시간으로 모니터링했다. 에어건 배열은 버블효과를 줄이기 위해 여러 개의 작은 클러스터로 구성된다. 따라서 각각의 클러스터의 NFH 파형이 잘 유지되는지 혹은 파형에 변화가 발생하는지 각각의 발파점마다 실시간으로 모니터링했다. 이를 통해 공기 누출, 발파 에너지 손실, 발파 지연 등의 문제를 실시간으로 감지할 수 있었다.
오프라인 품질관리 단계에서는 탐사 라인 종료 직후 저급중합을 제작하여 반사 신호의 연속성과 품질 이상 여부를 종합적으로 평가했다. 저급중합은 공심점(common depth point, CDP) 취합, 속도분석, 동보정(nomal moveout correction), 뮤팅, 중합 순으로 수행된다. 송수신기의 좌표 정보는 공칭좌표(nominal coordinates)를 사용하기도 하였으나, 항측자료 검수 후에는 탄성파 자료의 헤더 좌표를 항측자료의 좌표값으로 대체하여, 이후 공심점 및 오프셋(offset) 계산에 활용하였다.
항측자료의 검수는 갱신된 발파점 및 수신기 위치와 심도 등을 시각화하여 이탈값의 존재 여부나 항측 정보의 누락 여부를 확인하는 방식으로 수행하였다. 또한 이러한 좌표 갱신 자료를 이용하여 폴드 분포 등을 점검하는 데에도 활용하였다.
품질관리 시스템 활용 잡음원 관측 사례
해양탐사는 조류 및 너울 등 환경 변화에 따른 잡음 영향이 크며, 한반도 인근 해역에서는 어업 활동이 매우 활발하여 스트리머 탐사 시 다양한 형태의 잡음원이 관측된다. 본 논문에서는 탐해3호를 활용한 스트리머 탐사 중 관측된 주요 잡음원 사례들을 유형별로 정리하였다.
너울잡음(swell noise)
너울에 의해 발생하는 스트리머 진동은 저주파 대역에서 수신기 신호에 영향을 미치며, 이는 스트리머 탐사에서 흔히 발생하는 너울잡음으로 나타난다.
탐해3호에서는 탐사 라인 진입 시점과 종료 직후에 모든 수신 채널의 평균 배경잡음 수준(RMS)을 실시간으로 기록하고 있으며, 이를 통해 탐사 기간 중 환경 조건 변화에 따른 배경잡음의 변화를 모니터링하고 있다. Fig. 2는 2024년 5월부터 2025년 5월까지 국내 해상 313개 지점에서 스트리머 탐사 중 측정한 배경잡음 RMS 값과 당시의 파고 및 풍속을 산점도로 시각화한 것이다. 단, 파고는 0.5 m 단위로 기록되었으며, 각 파고 구간별 RMS의 평균값은 Fig. 2(a)에 적색으로 함께 표시하였다.
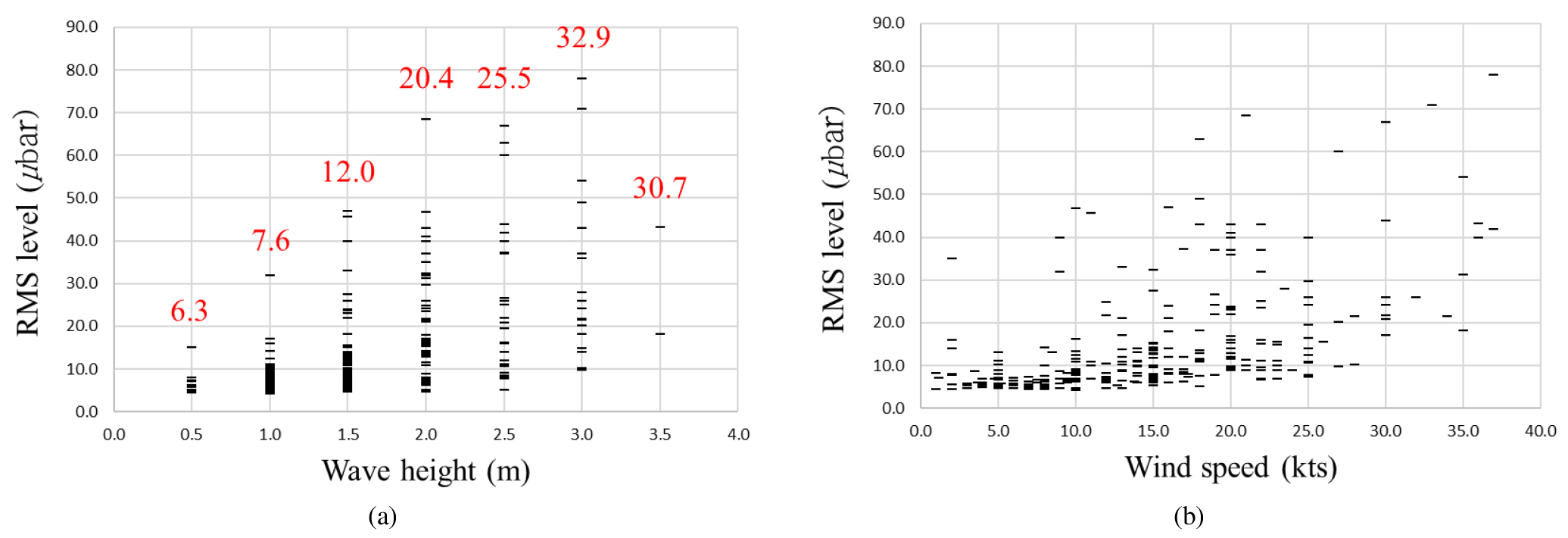
파고가 1 m 이하인 비교적 안정된 환경에서는 너울잡음의 영향이 거의 없으며, 이 경우 배경잡음은 약 4~7 µbar 수준으로 양호한 자료 품질이 유지된다. 반면, 파고가 1.5 m 이상부터는 40 µbar 이상의 고진폭 잡음이 기록되기도 했다, 이러한 고진폭 잡음이 지속될 경우에는 날씨 예보와 탐사 일정을 바탕으로 탐사 라인의 중단 여부를 검토하였다.
이처럼 너울잡음의 강도는 해상 환경 변화에 민감하기 때문에 계절도 중요한 환경 요인이다. 2024년 여름 국내 해역에서 수행된 두 차례의 탐사에서는 각각 평균 배경잡음이 14.1 µbar, 7.2 µbar를 기록하였다. 반면, 2024년 겨울철에 수행된 탐사에서는 평균 배경잡음이 상대적으로 높은 수준인 23.4 µbar로 측정되었다.
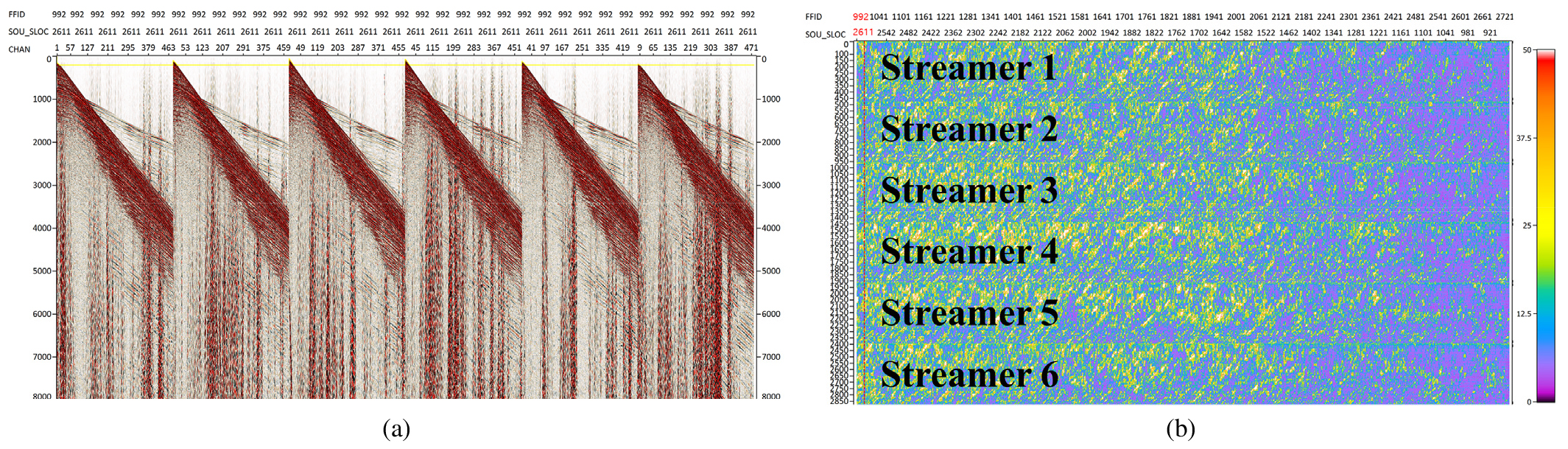
Fig. 3는 3차원 해양 탐사 중 심한 너울잡음이 관측된 사례를 보여준다. Fig. 3(a)는 6조 스트리머에서 기록된 음원모음을 나타내며, 자료 전반에 걸쳐 강한 진폭의 저주파 너울잡음이 분포하고 있는 것을 확인할 수 있다. Fig. 3(b)는 해당 탐사 라인에서 발파점에 따른 RMS 변화를 보여준다. 가로축은 발파점 번호, 세로축은 채널 번호로 구성되어 있어, 시간 경과에 따른 채널별 RMS 변화를 시각적으로 확인할 수 있다. 해당 탐사 라인이 시작될 당시 측정된 해상 조건은 파고 약 2 m, 풍속 약 20.0 kts였다. 따라서 탐사 라인 초기에는 고진폭의 너울잡음이 관측되었으나, 기상 예보에 따라 너울이 점차 감소할 것으로 판단되어 탐사는 중단없이 진행되었다. Fig. 3(b)에서 시간이 지남에 따라 점차 너울잡음이 감소하는 추세를 확인할 수 있다.
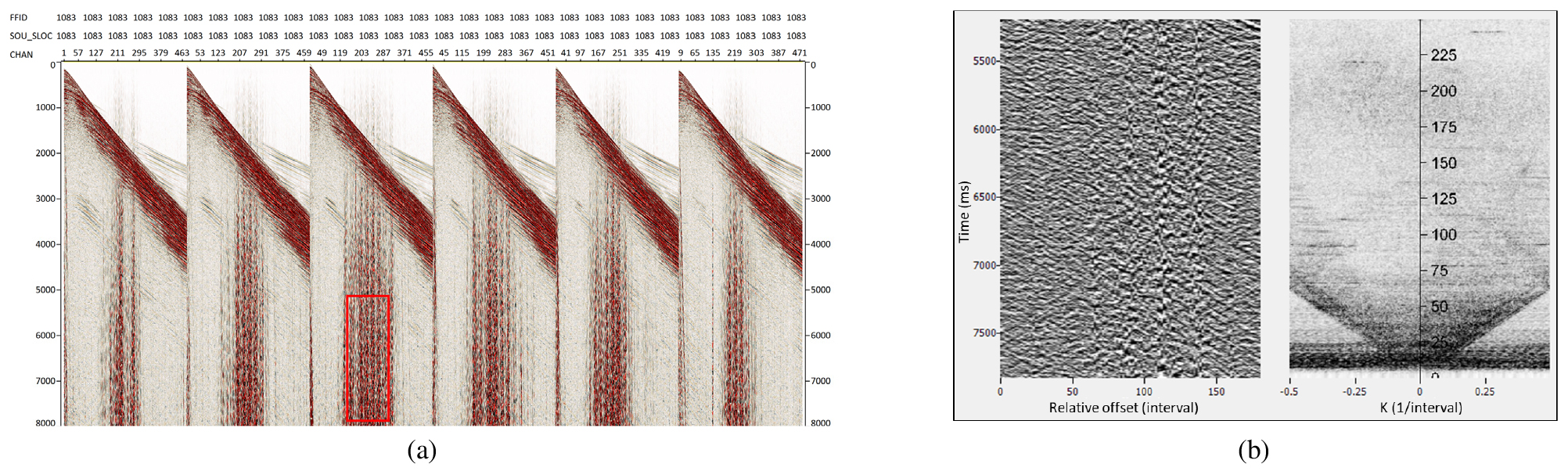
일반적으로 너울잡음은 낮은 주파수 대역에서 주로 관측되지만, 간헐적으로 10 Hz 이상의 고주파 너울잡음이 나타나는 사례도 확인되었다. Fig. 4(a)는 일반적인 저주파 너울잡음의 사례를 보여주며, Fig. 4(c)는 고주파 너울잡음이 기록된 사례이다. 각각의 사례에서 붉은색 박스로 표시된 영역을 f–k 변환한 결과는 Fig. 4(b)와 Fig. 4(d)에 도시하였다. 변환 결과를 통해, 저주파 너울잡음은 낮은 주파수 축에 집중되는 분포를 보이는 반면, 고주파 너울잡음은 보다 넓은 주파수 대역에 퍼지며 산란된 에너지 패턴을 보이는 특징이 확인되었다.
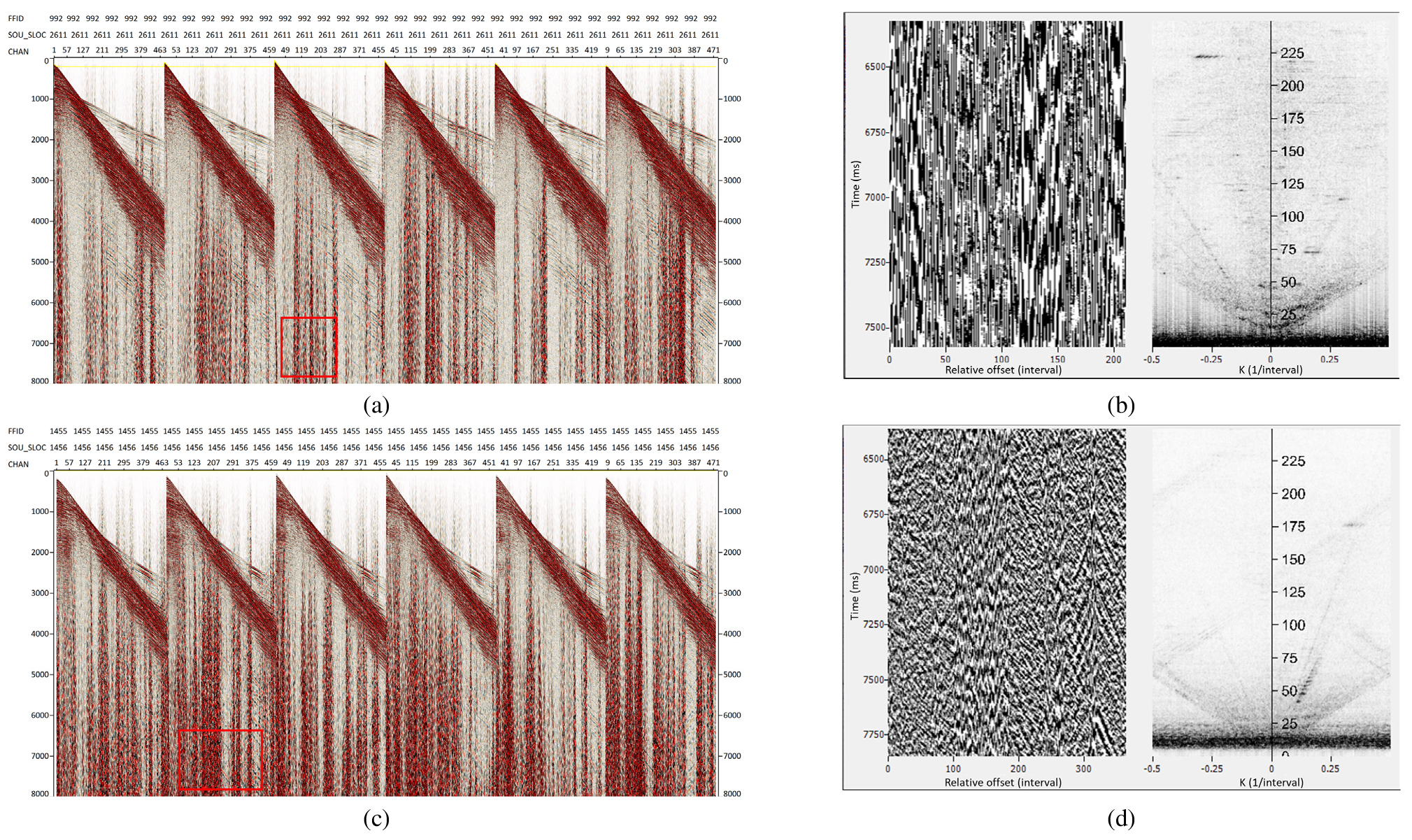
Fig. 4
(a) Shot gather with typical low-frequency swell noise. (b) f–k transform of the red-boxed area in (a), showing horizontally aligned low-frequency energy. (c) Shot gather with high-frequency swell noise exceeding 10 Hz. (d) f–k transform of the red-boxed area in (c), revealing broader and more scattered energy distribution across frequency.
스트리머 굴절(bending)에 의한 잡음
스트리머 탐사에서는 인근 선박, 어구, 구조물(부이 등)을 회피하기 위해 선박 항적의 급격한 조정이 불가피하게 발생할 수 있다. 이 과정에서 스트리머에 과도한 곡률(feather angle)이 형성되며, 곡률이 급격히 변하는 구간에서는 고주파 너울잡음과 유사한 패턴의 잡음이 관측되었다. 이는 스트리머 곡률 증가로 인해 케이블에 비정상적인 장력이 유도되며, 그 결과 수중 진동이 발생하는 것으로 해석된다.
Fig. 5(a)는 약 40°의 곡률이 스트리머 중앙부에 형성되었을 때의 음원모음으로, 곡률 구간에 강한 잡음이 집중되어 나타나는 것을 확인할 수 있다. Fig. 5(b)는 해당 구간을 f–k 변환한 결과로, 너울잡음과 유사한 에너지 분포를 보인다. 그러나 너울잡음이 전 채널에 걸쳐 무작위로 지속적으로 발생하는 배경잡음인 반면, 스트리머 굴절에 의한 잡음은 항적 변화 시점을 중심으로 초기 채널에서 후기 채널로 서서히 전파 이동하는 국지적 잡음이다.
선박잡음(ship noise)
탐사 해역에는 어선, 화물선, 체이스보트(chase boat) 등 다양한 선박들이 운항하고 있으며, 이들로부터 발생하는 수중 소음이 탐사에 영향을 미칠 수 있다. 특히 체이스보트는 탐사선을 호위하며 주변 선박의 접근을 통제하고 장비를 보호하는 역할을 수행하므로, 지속적으로 잡음을 유발할 수 있다.
선박잡음의 주된 발생 원인은 프로펠러 공동현상이다. 선박이 이동함에 따라 관측 영역에서 일관된(coherent) 형태로 나타나며, 실시간 RMS 진폭 분석에서 잡음원의 이동 방향을 확인할 수 있다. 따라서 추후 자료처리 단계에서 참조할 수 있도록 잡음 발생 시점과 시간에 따른 잡음의 이동 방향을 함께 기록하고 있다.
Fig. 6(a)와 Fig. 6(c)는 서로 다른 선박잡음 사례를 나타낸다. 두 예시 모두 음원모음에서 시간 상 일관된 잡음 패턴이 확인되며, 이는 선박이 이동할 때 나타나는 프로펠러 잡음의 반복성을 반영한다. 반면, 각 예시의 f–k 변환 결과인 Fig. 6(b)와 Fig. 6(d)에서는 서로 다른 주파수 성분과 곡률 특성이 나타났다. 이는 프로펠러의 종류와 선박의 운항 조건(탐사선과의 거리, 속도 등)에 따른 차이로 보인다.
선박잡음은 일관성을 가진 잡음이므로 RMS 에서도 식별된다. Fig. 6(e)는 Fig. 6(a)와 동일한 탐사 라인에서의 RMS 변화를 나타내며, 잡음원이 탐해 3호와의 상대적 위치가 변함에 따라 RMS 진폭 분포가 달라지는 양상이 뚜렷하게 관찰된다. Fig. 6(e)에서는 근접 트레이스에서 기록된 잡음이 발파가 진행됨에 따라 스트리머의 후방으로 이동하는 모습이 확인된다.
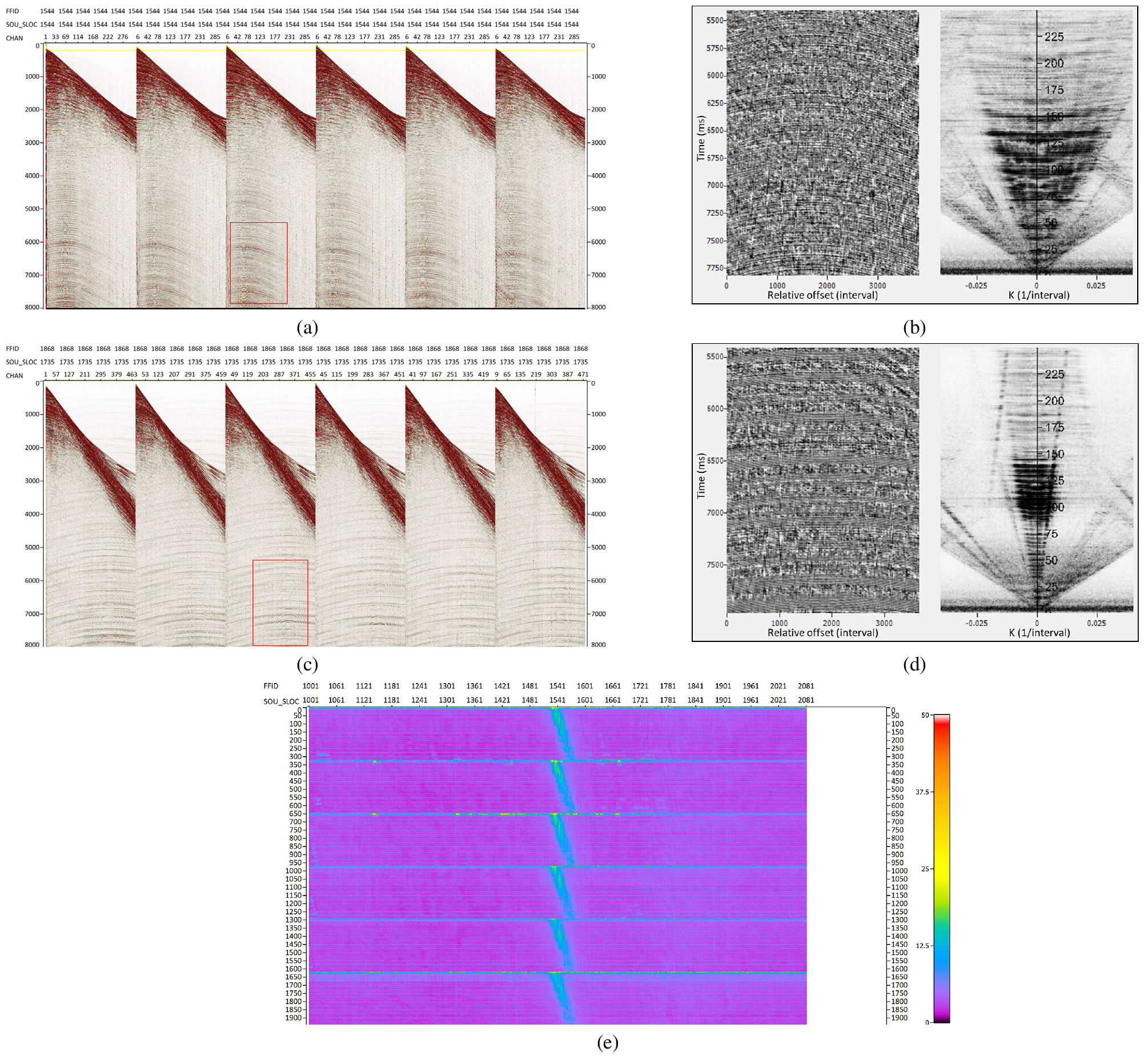
한편, 간혹 스트리머 근처의 선박이나 잠수함으로부터의 반사 에너지가 탐사 자료에 기록되기도 하였다. Fig. 7(a)와 Fig. 7(c)는 이와 같은 주변 선박 반사 에너지가 기록된 사례이며, Fig. 7(b)와 Fig. 7(d)는 각각 Fig. 7(a)와 Fig. 7(b)의 잡음 구간을 f–k 변환한 결과이다. 형태의 차이는 있지만, 두 경우 모두 일반적인 하부시간대 반사파와는 다른 비정상적인 고주파 에너지 분포와 곡률 특성을 나타낸다.
스트러밍 잡음(strumming noise)
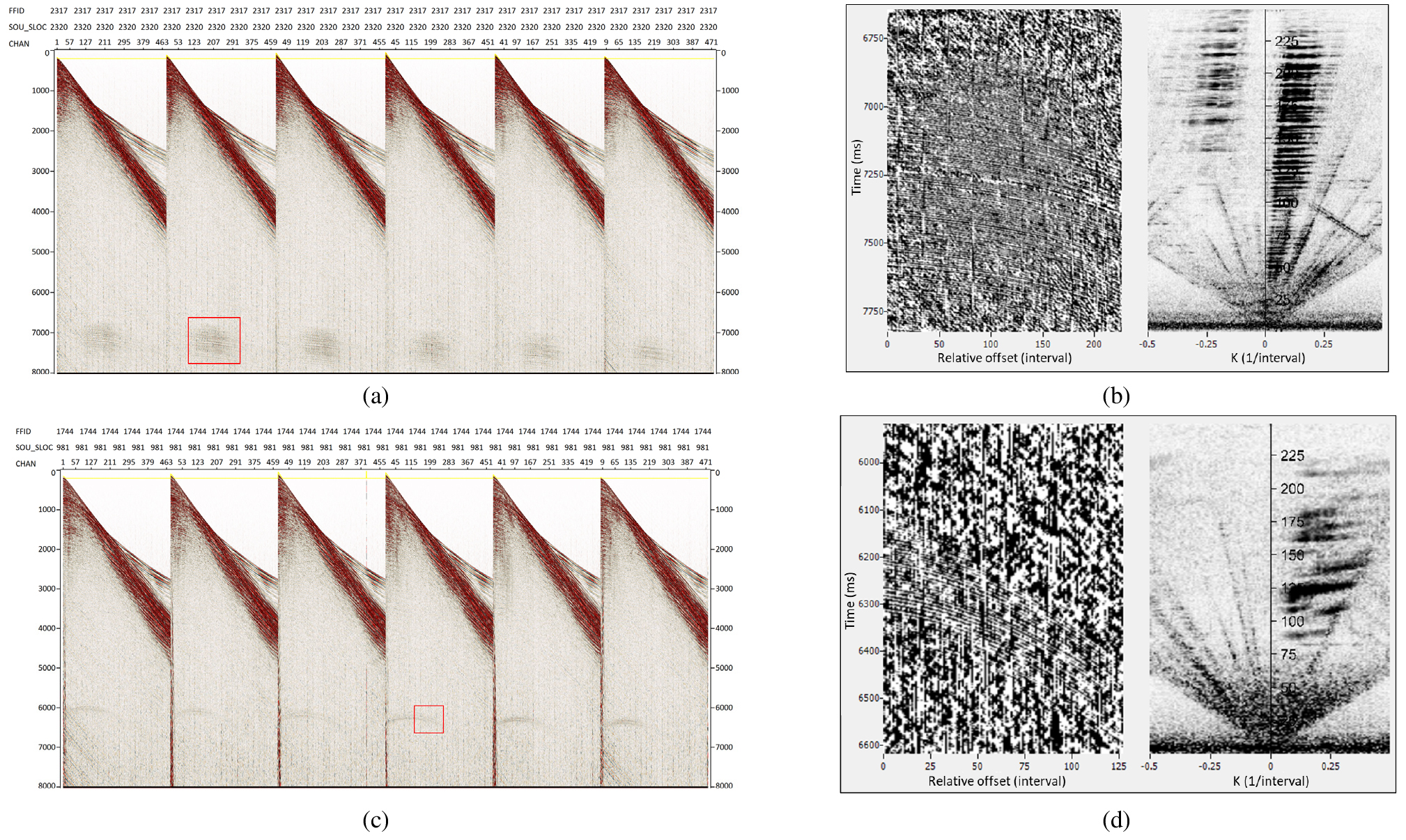
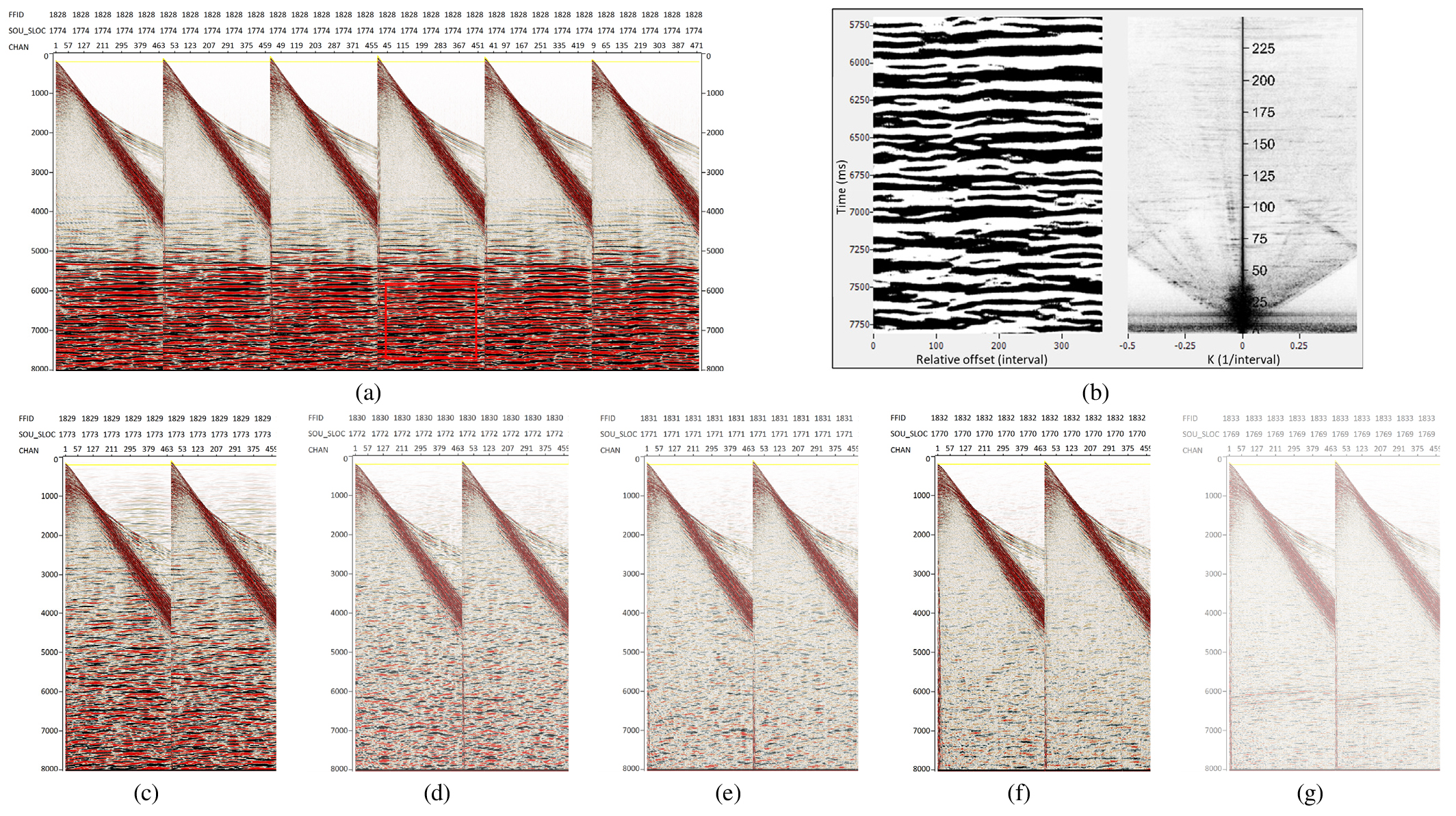
스트러밍 잡음은 스트리머에 걸리는 장력 변화로 인해 발생하는 진동성 잡음이다. 앞서 언급한 스트리머 굴절에 의한 잡음과 같이 스트러밍 잡음 또한 스트리머 케이블의 동적 거동에서 기인하지만, 발생 메커니즘과 특징은 서로 다르다. 굴절에 의한 잡음은 과도한 곡률에 의해 국부적인 장력이 수중 진동으로 나타난다면, 스트러밍 잡음은 장비 견인으로 발생하는 지속적 잡음이다. 특히 스트리머 견인 중 장력이 변화함에 따라 발생하는 이 잡음은, 오프셋이 증가함에 따라 잡음 신호가 후기 시간으로 이동하는 일관된 경향을 보인다. 특히 3D 탐사의 경우 디플렉터로 인해 외각 스트리머일수록 상대적으로 높은 장력이 가해져 스트러밍 잡음이 더 크게 나타났다(Fig. 1(a)). 반면, 스트리머 후미에 설치된 테일부이(Fig. 1(e)) 또한 스트리머를 끌어당기며 진동을 유발할 수 있으며, 이 경우에는 음원모음에 견인 방향과 반대 기울기를 가진 잡음이 발생했다. 탐해3호를 이용한 탐사에서는 전반적으로 테일부이에 의한 스트러밍 잡음의 진폭은 상대적으로 낮은 수준으로 관측되었다.
Fig. 8은 스트러밍 잡음의 실제 사례를 보여준다. Fig. 8(a)는 3차원 탐사 중 확보된 음원모음으로, 최외각에 위치한 1번 및 6번 스트리머에서 특히 강한 스트러밍 잡음이 관측된다. Fig. 8(b)와 Fig. 8(c)는 각각 1번 스트리머의 1번 채널 트레이스(근거리)와 80번 채널 트레이스를 추출한 공통 수신기 모음으로, 스트러밍 잡음은 근거리 트레이스 모음에서 강하게 나타나기 때문에 식별이 용이하지만, 80번 채널 트레이스에서는 잡음의 식별이 어렵다. 또한 스트러밍 잡음은 음원모음 상에서 뚜렷한 기울기를 가지는 잡음이므로, 크로스피드 중합에서는 대부분 상쇄되어 잘 나타나지 않는 특징을 가진다.
탄성파 간섭(seismic interference, SI)
탄성파 간섭은 탐사지역 인근에서 발생하는 외부 탄성파 활동에 기인한 간섭성 잡음으로, 일반적으로는 주변 해역에서 운용 중인 타 탐사선의 주기적인 발파 신호에 의해 발생한다(Hlebnikov et al., 2021). 본 논문에서는 일반적인 탄성파 간섭 외에도, 단일 음원에 의한 간헐적 간섭 신호까지 포함하여 다룬다.
탄성파 간섭의 경우 주 탐사의 발파 신호와 외부 간섭 신호가 음원모음 상에서 중첩되어 나타나며, 탐사선의 항적 방향과 간섭원의 상대 위치에 따라 H/T (head-to-tail), B/S (broadside), T/H (tail-to-head) 형태로 나타날 수 있다.
Fig. 9(a)–(e)는 다양한 탄성파 간섭 사례를 나타내며, Fig. 9(f)–(j)는 해당 예제의 f–k 변환 결과이다. 이 중 Fig. 9(j)는 Fig. 9(e)에서 잡음 영역만 부분적으로 변환한 결과이며, 나머지 Fig. 9(f)–(i)는 각각 전체 음원모음을 f–k 도메인으로 변환한 것이다. Fig. 9(a)와 Fig. 9(b)는 각각 T/H 및 H/T 방향의 간섭으로, 두 신호 모두 공기를 통해 전파되어 음원모음 상에서 기울기가 매우 느리고, f–k 도메인에서도 반사 신호와 명확히 분리되어 나타난다. 해당 신호는 탐사 당시 인근 상공을 통과한 제트기에서 발생한 소닉붐(sonic boom)에 기인한 것으로, 충격파가 공기를 통해 전파되어 스트리머에 기록된 사례이다.
Fig. 9(c)와 Fig. 9(d)는 수중으로 전파된 간섭으로, 각각 인근 탐사선에서 기인한 T/H, H/T 탄성파 간섭이다. 이 중 T/H 간섭은 f–k 분석에서 뚜렷하게 식별 가능하지만, H/T 간섭은 일반적인 반사파의 무브아웃과 유사하게 나타나기 때문에, 후속 처리에서 tau-p 필터링 등 정교한 간섭 제거 알고리즘이 요구된다.
Fig. 9(e)는 B/S 간섭 사례이며, 간섭원이 멀리 위치할수록 수평에 가까운 무브아웃으로 음원모음에 기록된다. 이 경우 f–k 도메인 상 저파수 구간에 에너지가 집중되어 나타났다.

Fig. 9
(a), (b) T/H and H/T interference propagated through air, respectively. (c), (d) T/H and H/T interference propagated through water from nearby seismic vessels, respectively. (e) B/S interference example. (f)-(i) f-k transforms of (a)-(d). (j) f-k transform of the red-boxed region highlighted in (e).
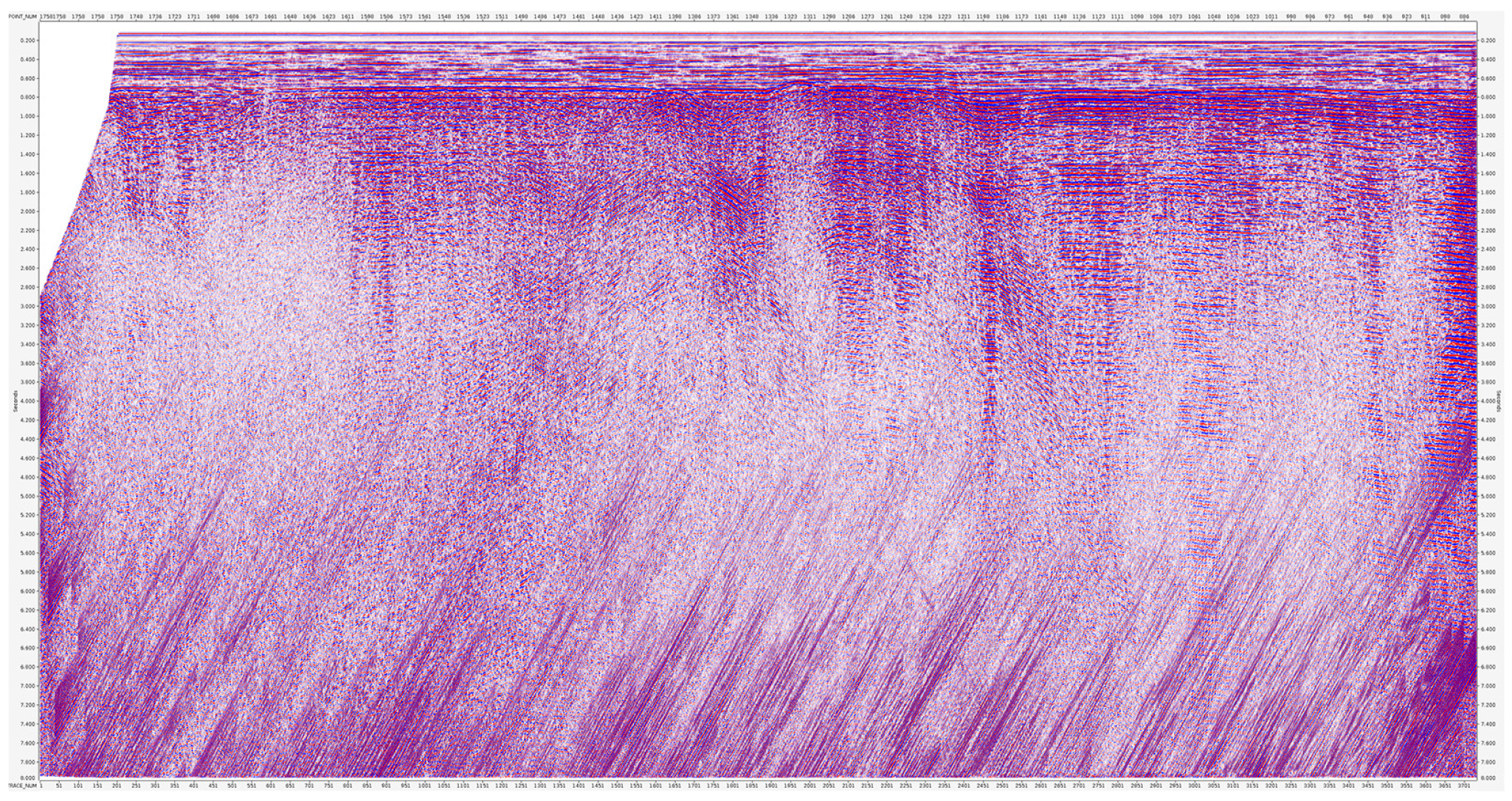
한편, Fig. 10은 Fig. 9(d)에 해당하는 탐사라인의 저급중합 자료로, 간섭 신호가 중합 이미지에 심각한 품질 저하를 유발할 수 있음을 보여준다.
자연 지진(earthquake)
외부 탄성파 활동에 의한 간섭 외에도, 자연 지진으로 인한 진동이 탐사 자료에 간헐적으로 기록될 수 있다. Fig. 11은 지진 신호가 탐사 자료에 기록된 사례를 나타낸다.
Fig. 11(a)는 모든 채널에서 비정형적인 저주파 잡음이 강하게 기록된 음원모음을 보여주며, Fig. 11(b)는 해당 잡음 영역에 대한 f–k 변환 결과이다. 이어지는 Figs. 11(c)–(g)는 Fig. 11(a) 이후 5개 발파에 대한 1번 및 2번 스트리머의 음원모음을 보여준다. 이 구간에서도 무브아웃을 식별하기 어려운 저주파 잡음이 약 1분간 지속되었으며, 이는 지진의 표면파에 해당할 가능성이 크다.
크로스피드 잡음
스트리머 탐사에서는 장비의 물리적 결함 또는 전기적 이상으로 인해 발생하는 다양한 잡음이 관측된다. 스트리머 장비 잡음은 특정 채널에 집중되거나, 채널 간 전이되는 형태로 나타날 수 있다.
크로스피드 잡음은 채널 간 신호가 서로 간섭되어 인접 트레이스로 전이되는 형태로 발현되는 대표적 장비 잡음이다. Koo et al. (2008)에서 이미 물리탐사선 ‘탐해2호’에서 관측된 크로스피드 잡음 사례를 보고한 바 있다. 신규 도입된 탐해3호에서는 LAUM의 이상으로 인한 크로스피드 잡음이 관측된 사례가 있다.
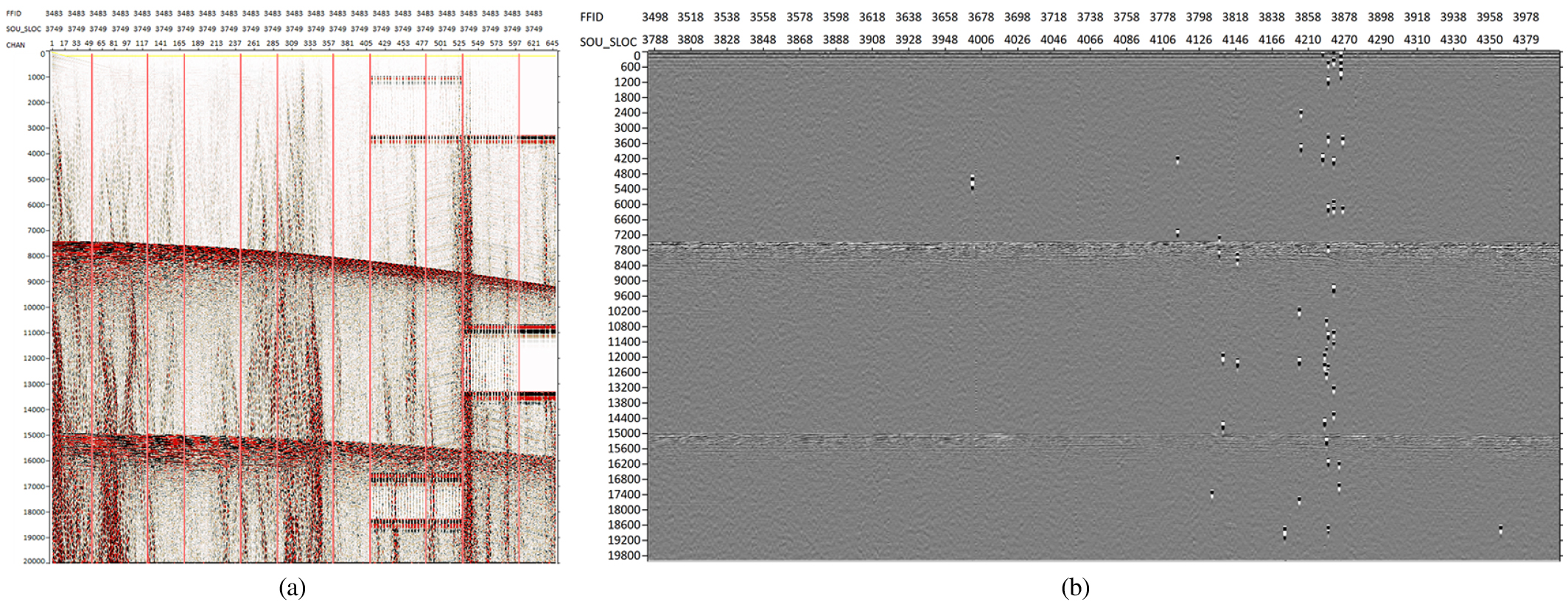
LAUM은 스트리머에 전력을 분배하고 스트리머별로 취득되는 자료를 집계·변환·전송하는 장치이다. 탐해3호에서 활용 중인 스트리머 섹션은 12개의 채널로 구성되는데, LAUM은 스트리머 섹션 4~6개마다 설치되어 스트리머 간 전원을 분배하고 수신 신호를 집계·변환·전송하는 역할을 수행한다. 탐해 2호에서는 5개 섹션마다 LAUM을 설치하여 운용하였다. 반면 탐해 3호에서는 2개 섹션마다 스트리머 부착형 장비를 설치하고 있어 동간격으로 LAUM 설치가 불가능하다. 따라서 4~6개 섹션 간격으로 불규칙하게 LAUM을 배치하여 부착형 장비의 설치 위치를 피하도록 하고 있다. 이러한 LAUM 장비에 이상이 발생하면 해당 장비 이후 구간의 신호가 간헐적으로 손상될 수 있다. Fig. 12는 약 8 km 길이의 스트리머에 설치된 10개의 LAUM 중 7번째 LAUM이 손상되었을 때 발생한 잡음 사례를 보여준다. Fig. 12(a)는 잡음이 포함된 음원모음이며, Fig. 12(b)는 이 때의 크로스피드 중합이다. 그림에서 LAUM의 위치는 적색 선으로 표시되어 있다.
스파이크 잡음
스파이크 잡음은 고진폭 신호가 간헐적으로 발생하는 현상으로, 일반적으로는 스트리머 장비의 전기적 결함에 의해 유발되는 것으로 알려져 있다. 탐해3호에서는 탐사 중 스트리머에 어구가 얽히며 스트리머가 꼬이고, 이로 인해 한 개 채널이 손상되면서 스파이크 잡음이 불규칙하게 발생한 사례가 있다.
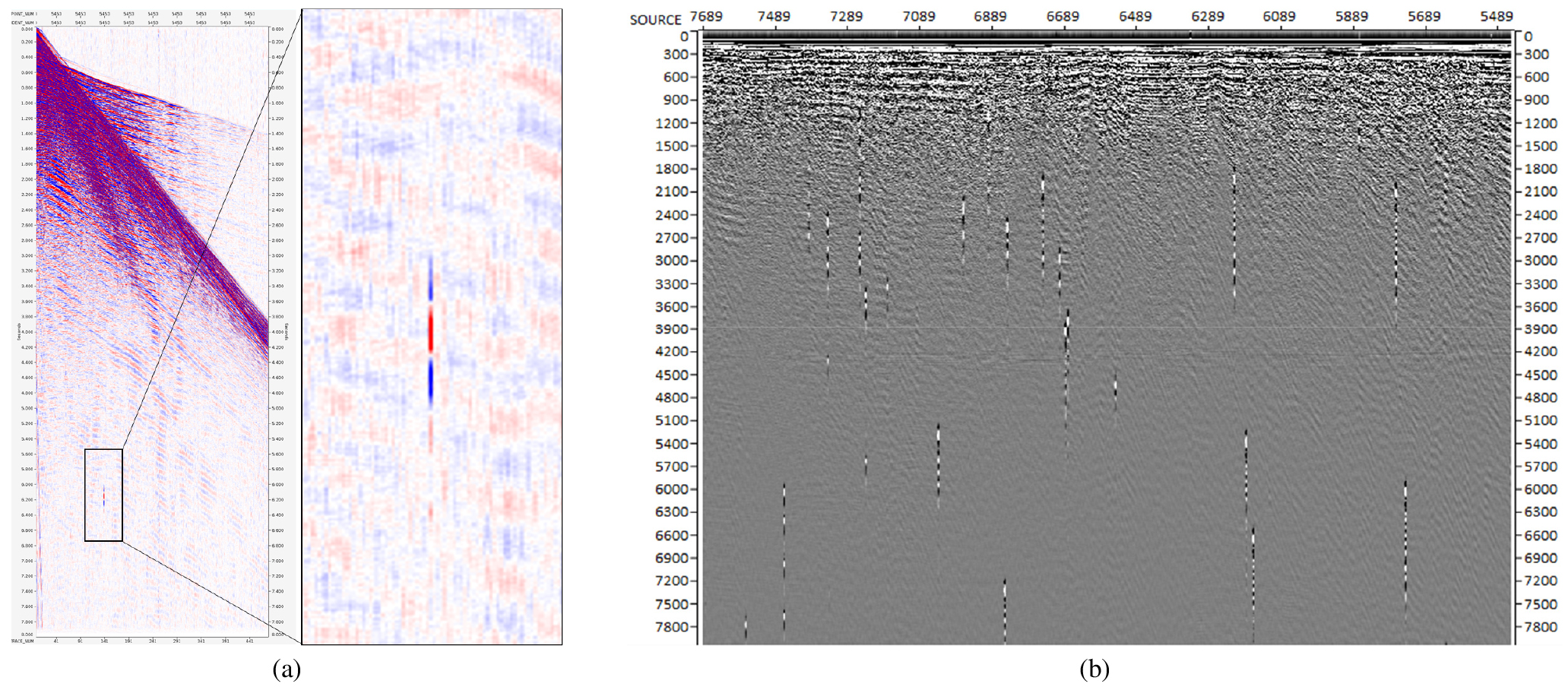
한편, 전기적 결함에 의한 스파이크 잡음은 아니지만, 어구에 의한 스트리머 타격이 스파이크 잡음의 형태로 기록된 사례도 있다. 특히 스트리머에 걸린 어구는 반복적 충격을 유발할 수 있으며, 해당 잡음은 어구가 제거되기 전까지 자료 전반에 걸쳐 지속적으로 나타난다. 후속 처리 단계에서 참조될 수 있도록 잡음이 관측되는 시점들을 상세히 축적하였다. Fig. 13은 해당 잡음이 관측된 음원모음과 크로스피드 중합 결과를 보여준다.
스트리머 부착형 장비에 의한 잡음
스트리머 탐사에서는 스트리머 부착형 장비가 스트리머 케이블에 일정 간격으로 부착된다. 이러한 부착형 장비의 종류로는 수심 제어 및 방향(heading)·휘어짐(feathering) 측정 장치(compass bird), 방향 센서·비상 부상 장치(Heading Sensor Recovery Device, HSRD), 수심 및 방향 제어 장치(Nautilus Streamer Node, NSN) 등이 있다.
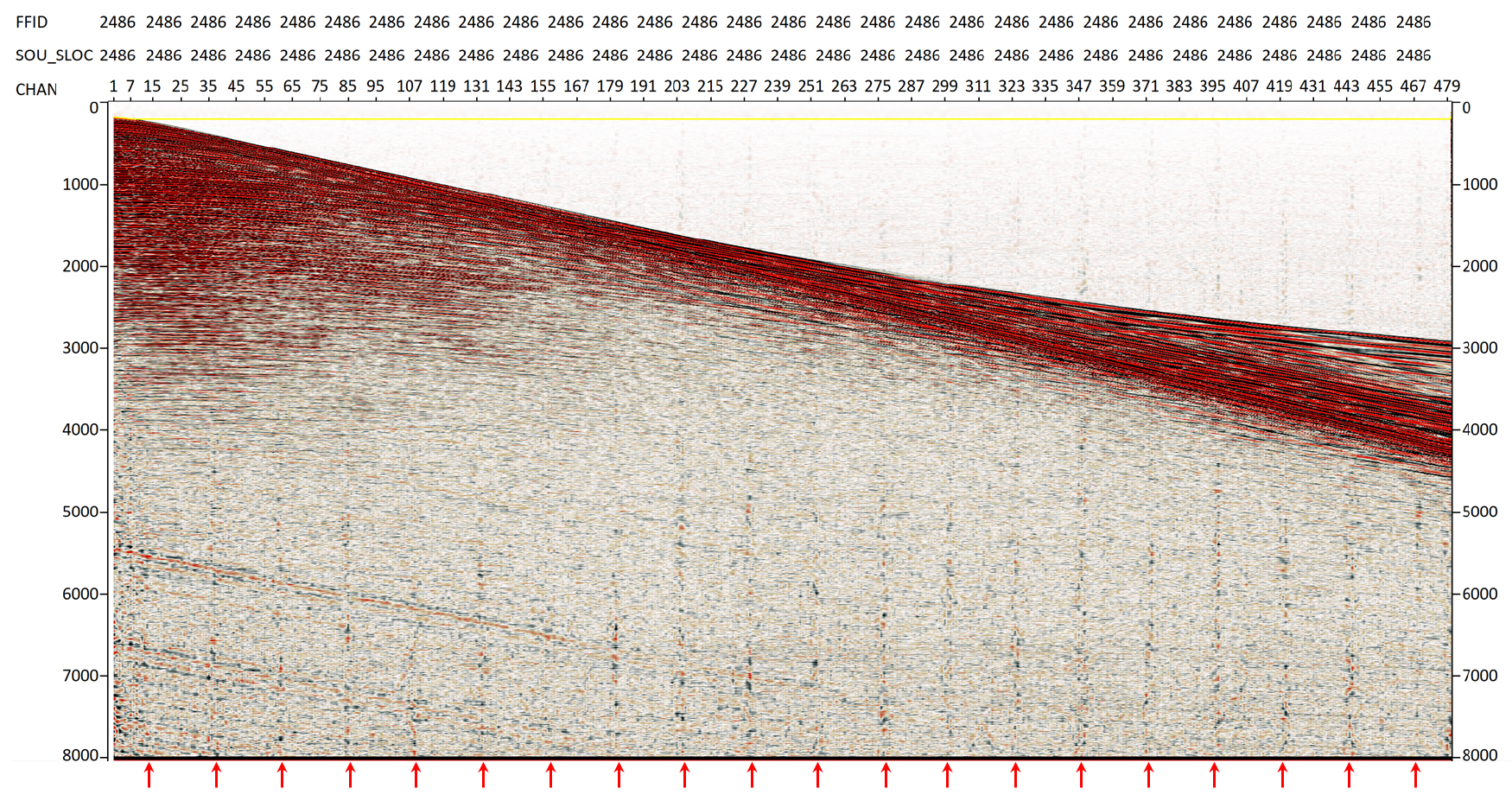
탐해3호 스트리머 탐사에서는 스트리머의 수심과 방향을 안정적으로 제어하고, 실시간 항측 정보를 확보하기 위해 NSN과 HSRD가 병행 사용되고 있다(Fig. 1(c)–(d)). 이러한 스트리머 부착형 장비들은 물 속에서 유속 저항을 유발하며, 특히 NSN은 조향을 위한 작동 과정에서 상대적으로 많은 잡음을 발생시킨다. 이로 인해, 스트리머 상에 일정 간격으로 부착된 NSN 부착 지점의 인근 트레이스는 상대적으로 신호 대 잡음 비가 낮다. Fig. 14은 음원모음 상 NSN 위치를 화살표로 표시한 예시로, 해당 지점의 트레이스에서 상대적으로 높은 잡음이 국지적으로 발생하는 것을 확인할 수 있다.
또한 NSN은 수심 조절 및 조향을 위해 날개형 구조를 가지며, 이는 어구가 쉽게 걸릴 수 있는 물리적 조건을 제공한다. 한번 NSN에 걸린 어구는 회전하는 날개에 엉켜 쉽게 분리되지 않으며 결과적으로 스트리머 케이블의 꼬임 현상을 유발할 수 있어 즉각적인 조치를 필요로 한다. Fig. 15(a)는 1번 스트리머 내 204번과 205번 채널 사이 설치된 NSN 장비에 어구가 걸렸을 때 음원모음이다. NSN 주변 채널에서 강한 잡음이 발생한 것을 확인할 수 있다. 또한 어구가 걸린 NSN이 스트러밍 잡음을 유발하여, 견인에 의한 스트러밍 및 테일부이에 의한 스트러밍과 함께 복합적으로 혼재되어 있는 형태로 나타났다. Fig. 15(b)의 RMS변화를 보면, NSN 주변 채널에서 어구가 걸린 시점 이후 라인이 종료될 때까지 지속적으로 강한 잡음이 유입되는 양상을 확인할 수 있다.
한반도 인근 해역은 폐어구가 다수 잔존하는 해역으로, 탐사 중 스트리머에 어구가 걸리는 사례가 빈번하게 발생한다. 어구가 NSN 등에 걸릴 경우 스트리머를 회수한 뒤 어구를 제거하고 다시 스트리머를 재배치해야 하므로 상당한 시간이 소요된다(Fig. 15(c)). 따라서 날씨가 양호한 조건에서는 낮 시간대를 활용하여 워크보트를 투입해 스트리머를 회수하지 않은 상태에서 어구를 현장에서 직접 제거하고 손상된 NSN을 교체하기도 한다(Fig. 15(d)).
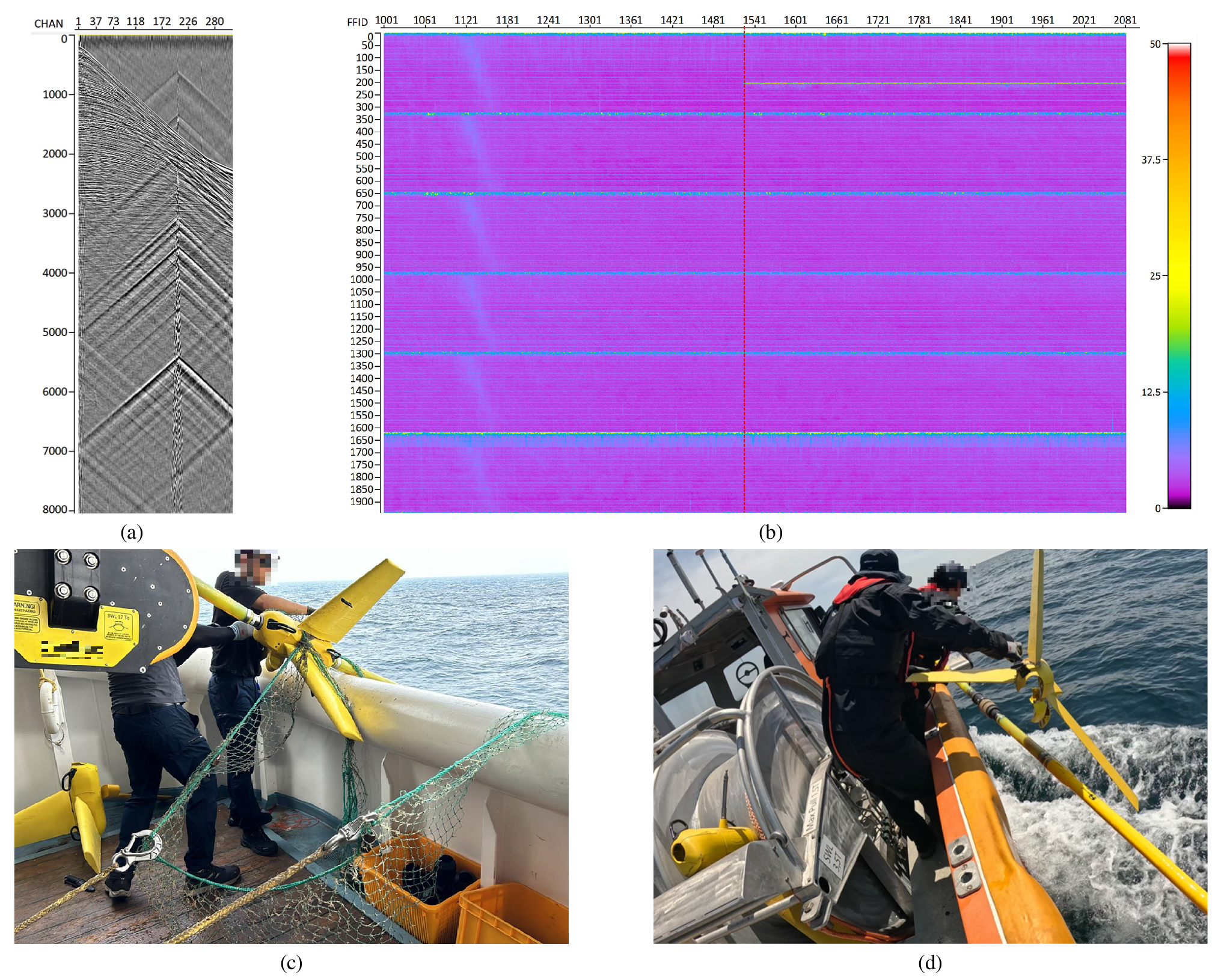
Fig. 15
(a) Shot gather showing high amplitude noise localized near the affected NSN, installed between channels 204 and 205 on streamer 1. (b) RMS amplitude showing persistent noise occurring after fishing gear became entangled with the NSN unit (c) Image of streamer retrieval operation used to remove entangled fishing gear. (d) Work boat deployed to recover the gear directly on site.
공기 누출(air-leakage)
해양 탄성파 탐사에서는 에어건 배열을 이용해 음파를 발생시키는데, 이 과정에서 에어건 장비 또는 연결 호스의 결함으로 인해 공기 누출이 발생할 수 있다. 공기 누출은 발파 에너지의 균일성을 저하시켜 탐사 자료의 품질에 직접적인 영향을 미칠 수 있다. 탐해3호에서는 NFH 모니터링 모듈들을 활용하여 각 발파 직후 에어건의 버블 주기, 최대 진폭 등을 실시간으로 모니터링하였다. 공기 누출이 발생하면 파형이 비정상적으로 변형되어 NFH 신호를 발파 시점마다 모니터링하면 공기 누출, 에너지 손실, 발파 지연 등 이상 신호를 조기에 감지할 수 있다.
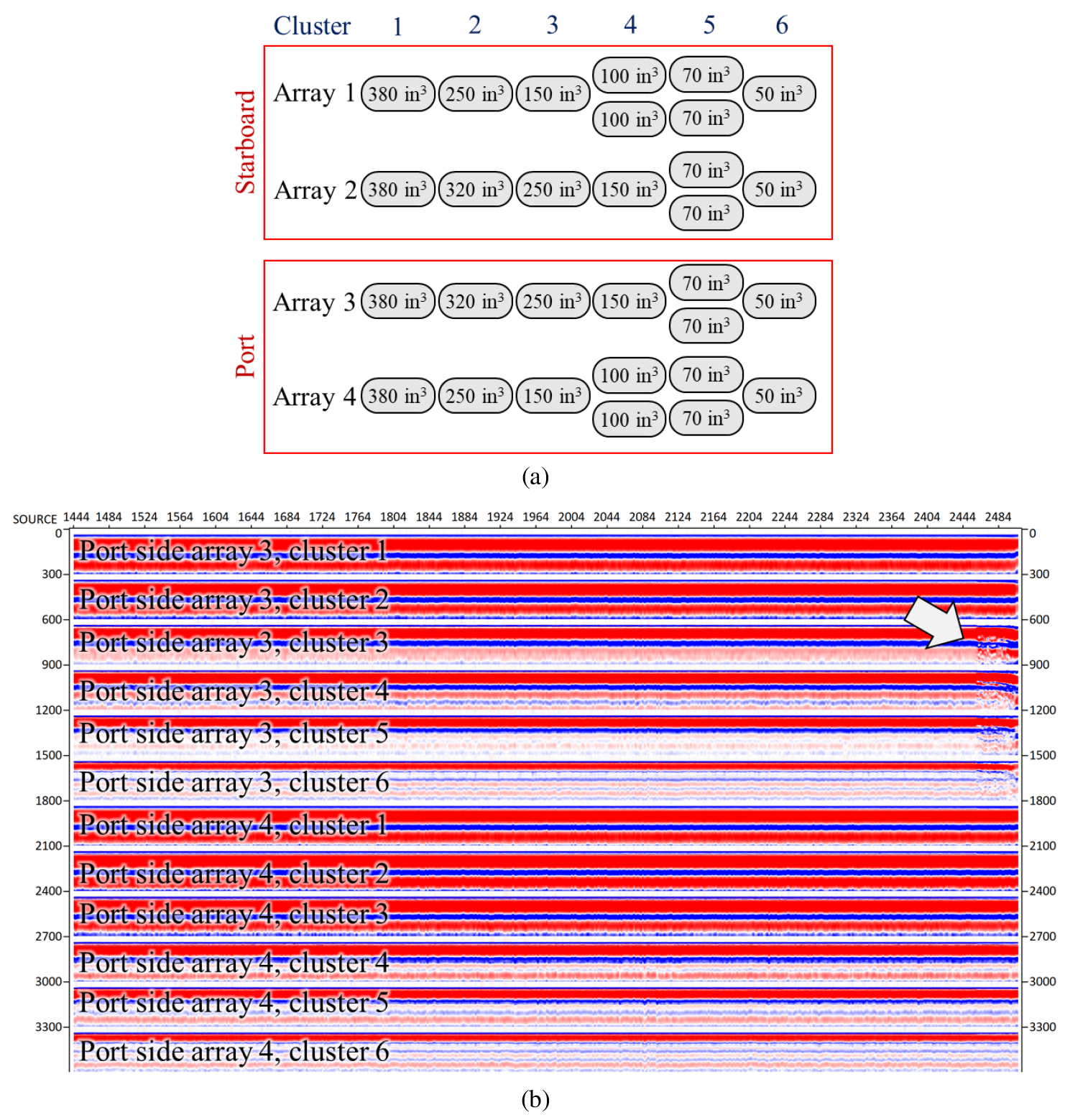
Fig. 16은 공기 누출이 발생한 경우, 에어건 발파에 따른 NFH 파형의 변화를 나타낸 사례이다. Fig. 16(a)는 해당 탐사에서 사용된 에어건 배열의 구성을 도시한 것으로, 우현(starboard)과 좌현(port) 측에서 각각 두 개의 어레이를 활용해 flip-flop 방식으로 교대 발파하였다. 각 어레이는 복수의 클러스터로 구성되었으며, Fig. 16(a)에 클러스터별 볼륨도 함께 표시하였다. 우현과 좌현 배열을 각각 개별적으로 모니터링하였으며, Fig. 16(b)에는 공기 누출이 발생한 좌현 어레이의 NFH 신호를 나타낸다. 해당 파형에서 변형이 관측되는데 이는 공기 누출 상태의 전형적인 특징이다. 공기 누출이 탐지되었을 경우, 발파 중단 및 에어건 정비 작업이 수행되었으며, 이러한 실시간 품질관리 체계를 통해 탐사 품질 저하를 최소화할 수 있었다.
후속 자료처리에서의 품질관리 기록 활용
선상 실시간 품질관리 단계에서 기록된 다양한 분석 결과는 탐사 종료 후 후속 자료처리 단계에서의 품질 판단 및 처리 변수 설정에 핵심적인 참조 자료로 활용된다. 이에 따라, 실시간 품질관리 기록은 자료처리자가 용이하게 해석하고 반영할 수 있도록 체계적으로 작성되어야 한다. 탐해3호에서는 탐사 라인 개별 로그에 잡음 발생 유형 및 장비 이상을 발파점 번호와 함께 상세히 기술하고 있다. 이러한 기록은 후속 자료처리 단계에서 잡음 유형에 따른 최적화된 감쇄 기법을 적용하는 기준 자료로 활용된다.
Fig. 17은 대표적인 잡음 사례에 대한 잡음 제거 전후의 음원모음 비교이다. Fig. 17(a)는 스트러밍 잡음과 약한 너울잡음이 포함되어 있다. Fig. 17(b)는 Fig. 17(a)보다 높은 너울잡음이 포함되어 있으며 LAUM 오류로 인한 크로스피드 잡음이 혼재되어 있다. Fig. 17(c)는 H/T 및 T/H 탄성파 간섭이 모두 기록되어 있는 음원모음의 예시이다. 이러한 잡음에 대응하기 위해, Figs. 17(d)–(f)에는 각 사례별로 적용된 잡음 제거 결과를 제시하였다. 첫 번째 예제는 주파수 영역에서의 공간 필터링과 저주파 잡음 모델링·감산 기법을 단계적으로 적용했다. 두 번째 예제는 주파수 영역에서의 공간 필터링과 더불어 고진폭 억제 및 f–k 필터링을 순차적으로 적용하여 스트러밍·너울·크로스피드 잡음이 복합적으로 존재하는 자료를 개선하였다. 세 번째 예제는 tau–p 도메인에서 H/T 및 T/H 간섭 신호를 분리하고 원본 자료로부터 감산해 간섭 성분을 효과적으로 제거하였다.
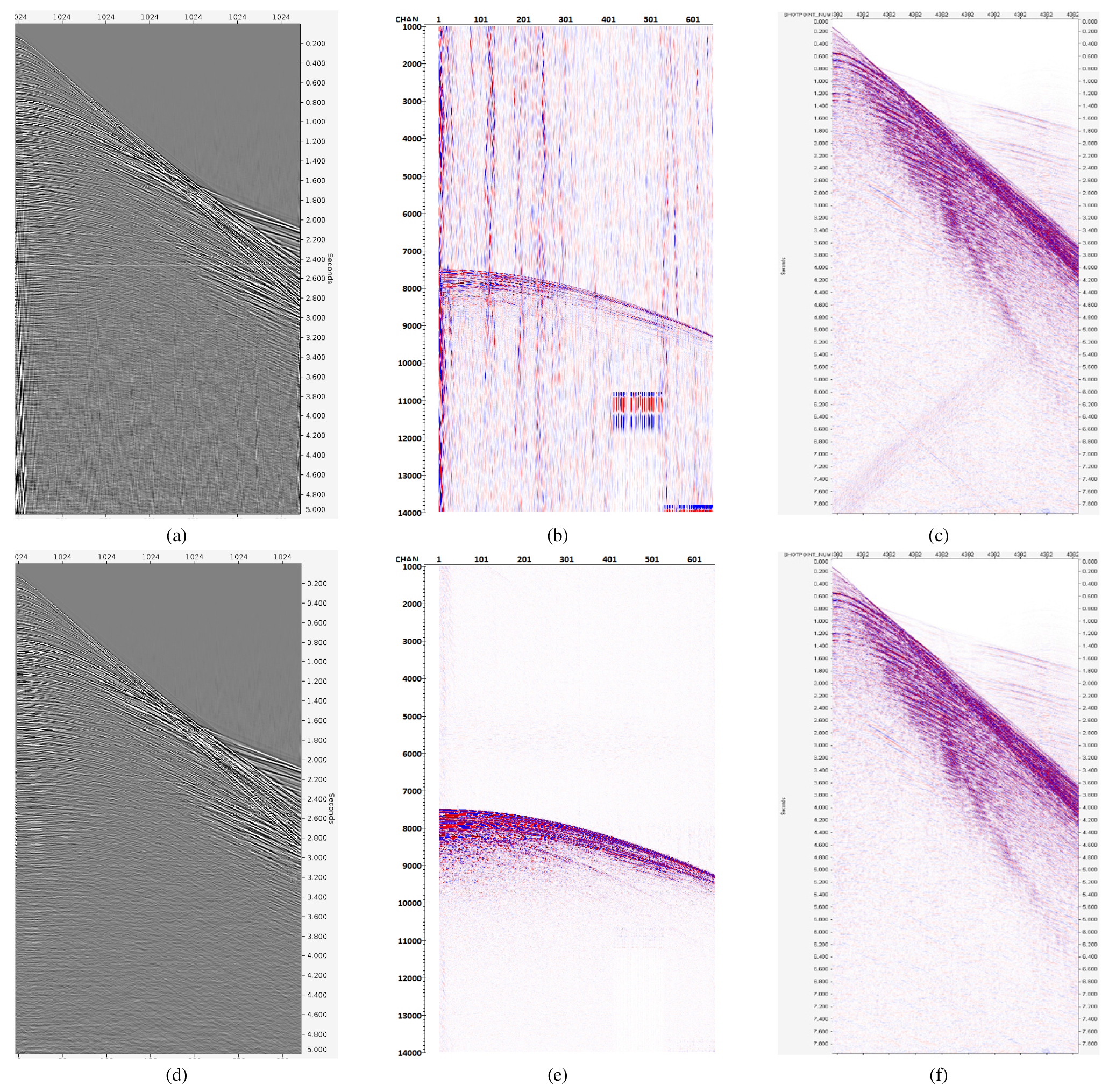
Fig. 18(a)와 Fig. 18(b)는 Fig. 17(a)와 Fig. 17(d) 예제가 포함된 탐사 자료의 잡음 제거 전 중합 결과와 잡음 감쇄 적용 후 중합 결과를 각각 보여준다. 두 결과를 비교하면, 잡음 제거 후 하부 반사면이 더욱 선명하고 명확하게 표현된 것을 확인할 수 있다.
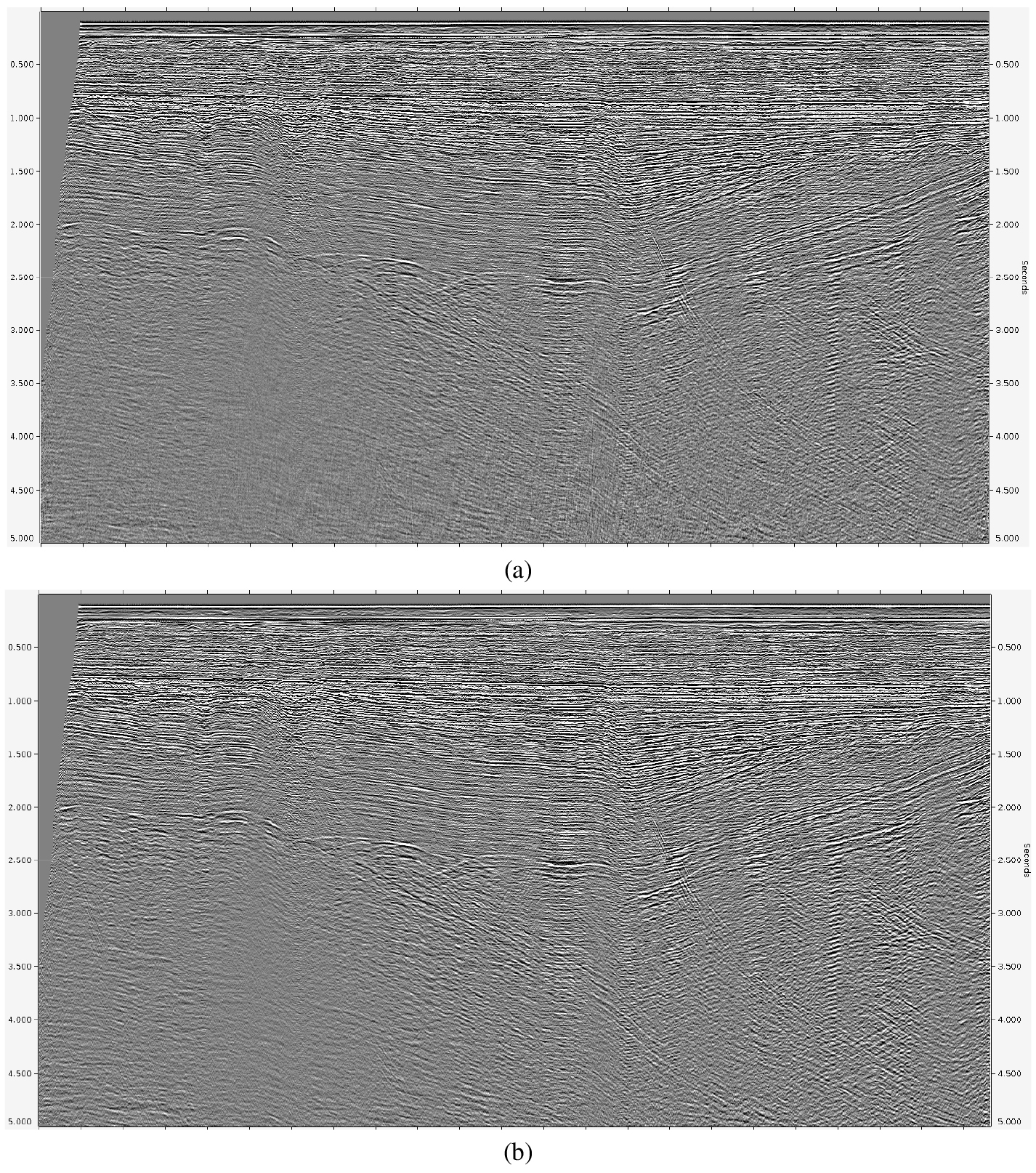
Fig. 18
Brute-stack results before and after noise attenuation for the example shown in Fig. 17(a) and 17(d). (a) Pre-attenuation brute stack. (b) Post-attenuation brute stack.
결 론
2024년 5월 공식 취항한 탐해3호로 다양한 규모의 스트리머 탐사가 수행되었다. 본 논문에서는 탐해3호에 구축된 선상 품질관리 시스템의 구조와 운용 사례를 소개하고, 탐해3호로 수행된 스트리머 탐사 중 관측된 주요 잡음원의 유형과 특성을 정리하였다. 해양 탐사 환경의 특성상 발생 가능한 다양한 잡음(너울잡음, 선박 잡음, 스트러밍 잡음, 탄성파 간섭, 장비 결함, 공기 누출 등)에 대해 실제 사례를 중심으로 원인과 특성을 분석하였으며, 이에 대한 실시간 대응 방식도 함께 제시하였다. 구축된 음원모음 및 RMS 모니터링, 근접 트레이스 모음, 크로스피드 중합, NFH 모니터링 모듈 등이 실시간 탐사 품질 확보에 효과적으로 기여하였다. 이러한 실시간 품질관리 체계는 양질의 데이터 품질 확보와 탐사 효율성 제고, 후속 자료처리 단계의 정확성 및 효율성 향상이라는 측면에서도 핵심적 역할을 수행할 것으로 기대한다.
