

서 론
해양탐사용 자력계의 특성
총 자력계(total field magnetometer, TFM)
선상 삼성분 자력계(shipboard three-component magnetometer, STCM)
탐사자료의 획득
자료의 전처리
스칼라와 벡터 자료를 이용한 보정
토의 및 결론
서 론
해양자력탐사는 지구물리탐사방법 중 널리 사용되는 탐사법 중 하나로 지구자기장의 변화를 관측하여 해양환경에서의 지질구조, 암석 및 광물분포 등의 이해하는데 사용되고 있다. 특히 이 방법은 해양환경에 영향을 주지 않으면서 광범위한 지역을 효율적으로 조사할 수 있다는 큰 장점을 가지고 있어 해양자원개발, 해저환경연구, 그리고 자연재해예방 등 다양한 분야에서 개척탐사(pioneer survey)로 주로 활용되고 있다.
19세기 후반부터 시작된 해양 자력탐사는 20세기 들어 세계 2차대전을 전후로 잠수함을 탐지하기 위해 탐사장비 및 해석기술이 비약적으로 발전해왔으며 현재는 양성자 세차 자력계, 오버하우저 자력계, 세슘 광펌핑 자력계 그리고 선상 삼성분 자력계 등 사용환경과 해상도를 고려한 다양한 자력계들이 개발되어왔다. 측정방법은 크게 두가지 방법으로 나뉘어지는데 가장 많이 사용되는 방법은 연구선 후방에서 견인하여 연구선의 자성효과를 최소화하여 지자기장을 획득하는 방법이다. 다른 하나는 연구선 중앙 상단에 자력계를 부착하여 배의 자성과 지자기장을 동시에 획득한 후, 보정과정을 통해 배의 자성효과를 제거하여 지자기장을 획득하는 방법이다. 전자의 경우 고품질의 지자기장을 획득할 수 있지만 선박의 단독사용이 필요하고 자력계를 운영할 수 있는 인력이 필요하다. 또한 자기장의 세기를 측정하여 벡터성분을 알 수 없다는 단점이 있다.
선상 삼성분 자력계(Shipboard Three-Component Magnetometer, STCM)의 경우 선박의 중앙에 설치하여 특정한 조작 없이 자료를 획득할 수 있고 무엇보다도 벡터 삼성분을 측정할 수 있다. 이런 큰 장점에도 불구하고 배의 자성, 그리고 연구선 마스트에 설치되어 있는 레이더로부터의 전파 간섭 등 여러 잡음의 영향에 의해 현재까지 전세계적으로 일본을 제외하고 대부분의 나라에서 주요하게 사용되지 못하고 있다. 이러한 문제점을 극복하기 위해 Isezaki (1986)가 처음으로 선박의 유도자화(induced magnetization)와 영구자화(permanent magnetization)를 고려한 STCM 보정방법을 고안해 냈으며 이 보정방법은 현재까지도 널리 사용되고 있다. 하지만 배의 점성자화 등 장파장의 잡음이 여전히 섞여 있어 지자기 이상도 제작에 사용되지 못하였다. 이후 Honsho et al. (2013)이 삼성분 자력계 보정 방법을 개선하였으나 이 방법은 국제 표준 지자기장(International Geomagnetic Reference Field, IGRF)상에서 관측된 지자기장과 해양지각 지자기이상으로부터 발생하는 유도자화 두 성분을 모두 고려한 보정법으로 더 정확한 삼성분 자력이상 자료를 얻을 수 있으나 여전히 배의 자성에 의한 기타 장주기 잡음 성분을 효과적으로 제거하지 못한다. 이후, Choe et al. (2021)에서 교차점 보정법을 활용하여 STCM으로 획득된 자료 보정법을 개발하였으며 이를 이용하여 고해상도 해양 지자기이상도를 제작하였다. 하지만 위 보정법으로 스칼라 값인 총 자력 성분은 보정 가능하지만 여전히 벡터 삼성분 보정에는 한계가 있어 벡터성분별 지자기 이상도 제작이 불가능한 상황이다.
자기장의 벡터 삼성분 정보는 기존의 스칼라 자력계로 얻은 자료와는 달리, 지각구조 및 기타 다양한 정보를 제공할 수 있다(Korenaga, 1995; Seama et al., 1993). 이러한 정보는 해양 및 육상에서 광물 분포, 지구조 해석을 더욱 정확하게 파악하는데 중요한 역할을 한다. 앞서 설명한 바와 같이 본 연구는 여전히 유용하게 사용될 수 있는 삼성분 자력계 보정법의 문제점들을 개선하기 위해 해수면 견인 총 자력계와 STCM을 이용하여 동시에 자료를 획득할 경우 선상 삼성분 자력계의 벡터 삼성분 자력이상 보정법을 소개하고 보정결과와 보정법이 향후 지구조분석 및 지자기 이상도 제작에 미치는 영향에 대하여 분석 및 논의를 하고자 한다.
해양탐사용 자력계의 특성
해양 자력탐사를 위한 자력계는 다양하게 개발되어 왔으나 측정방법에 따라서 크게 두가지로 분류할 수 있다. 원자의 스핀의 방향변화에 의한 세차운동을 이용하여 자기장을 총 세기를 측정하는 스칼라 자력계와 지구자기장과 지자기 이상 벡터합이 지자기 코일에 유도되어 자화가 발생하는 플럭스게이트(fluxgate) 자력계가 있다.
총 자력계(total field magnetometer, TFM)
총 자력계는 해양 자력탐사에서 가장 많이 사용되는 장비로 지하자원 탐사, 해저 화산폭발과 같은 자연재해 모니터링, 해양지자기이상도 제작 등 다양한 분야에 활용되고 있다. 이 자력계는 세슘 또는 케로신(kerosine)으로 충전되어 있는 챔버 내부에 지자기장의 간섭에 의해 원자들이 세차운동을 일으키는데 이때 발생하는 물리적 특성변화를 측정하여 지자기장의 세기를 관측한다(Choe, 2019). 뛰어난 민감도로 고해상도의 지자기 관측이 가능하여 전세계 여러 나라에서 해양 자력탐사를 수행할 경우 주로 TFM을 사용한다. 하지만 장비사용을 위해서는 별도의 천문학적 비용의 연구선 사용이 필요하고, 자기장의 벡터 값을 측정할 수 없다는 단점이 있다. 이러한 단점으로 자기장의 세기가 약하고 자기복각(inclination)이 0도에 가까운 자기적도 부근에서는 보이는 매우 약한 총 자력이상의 강도로 인해 센서의 감도저하가 발생하여 측정오류가 발생하기도 한다.
선상 삼성분 자력계(shipboard three-component magnetometer, STCM)
STCM은 x, y, z직교축으로 각각의 플럭스게이트 자력계로 구성되어 있으며, 각 센서는 주변 지구자기장의 변화와 배의 움직임에 의한 자기장 변화로 발생하는 코일 내 유도전류를 계측하여 자기장의 상대적인 변화를 측정한다. STCM은 선박에 영구적으로 설치하여 후방견인이 필요한PPM과 달리 별도의 조작없이 자료를 획득할 수 있다는 장점을 가지고 있다. 이 센서는 일반적으로 배의 선교(bridge) 위 마스트(mast) 주변에 설치하여 운영하여 자료를 획득하는데 전문인력이 필요하지 않아서 단독 연구 항차 조사가 없더라도 자료를 획득할 수 있다는 큰 장점이 있다. 하지만 연구선의 지향성 레이더에 큰 간섭을 받을 뿐만 아니라 여전히 남아있는 선박의 유도자화와 영구자화, 그리고 배의 자화 벡터 변화에 따른 점성자화의 변화, 선박의 자세 등 많은 변수와 잡음들로 인해 보정이 매우 까다롭다. 이로 인해 현재 전세계적으로 우리나라(Choi et al., 2023; Choe et al., 2021; Choe and Dyment, 2020; Lee and Kim, 2004)와 일본(Sato et al., 2009; Nogi and Kaminuma, 1999; Seama et al., 1993)에서 주도적으로 STCM을 이용한 자력탐사를 활용하는 추세이다. 그러나, 천문학적인 용선료와 독자적인 운영이 필요 없어 별도의 연구선 사용시간이 필요하지 않고, 이동 항차 간 조작없이 상시 자료를 측정할 수 있다는 큰 장점이 있을 뿐만 아니라 악천후 속에서도 자료를 획득할 수 있다.
STCM의 보정방법은 Isezaki (1986)에 의해 최초로 고안되었다. 이 방법을 이용하여 외핵에서 발생하는 지구자기장에 의한 배의 움직임에 의한 자기장의 변화, 배가 가지고 있는 고유 대자율과 영구자화성분을 보정할 수 있다. 현재도 이 방법이 광범위하게 사용되고 있지만 지구자기장의 세기에서 대략 1-3%전후로 나타나는 지자기이상에 의한 배의 자성변화 효과에 의한 오차를 보정할 수 없다. 이러한 지자기 이상에 의한 유도포함한 자성보정법은 Honsho et al. (2013)에 의해 고안되었으며 심해저 플럭스게이트 자력계를 이용한 자료 보정에 처음 적용되었다. 하지만 동시에 해수면 견인 총 자력계를 끌어야 한다는 점, 그리고 오랜 시간동안 비교적 빠르게 이동하는 선박 위에서 자력측정을 하기 때문에 지자기장의 변화에 따른 선박의 유도자화 벡터의 변화와 이 변화에 의해 발생하는 점성자화의 영향을 여전히 제거할 수 없다는 점 등에 대한 문제가 여전히 존재한다.
탐사자료의 획득
탐사자료는 일본해양연구개발기구(JAMSTEC)의 R/V Mirai로 수행한 MR14-01항차기간 중 얻은 자료를 사용하였다. 벡터 지자기장 측정을 위한 STCM은 Tierra Tecnica의 SFG1214 선박용 3성분 자력시스템이 선박의 앞쪽 마스트에 장착되어 있다. 이 자력계 시스템은 다중 링코어 코일로 이루어진 3축 플럭스게이트 센서로 구성되어 있고, 센서의 신호를 20 비트의 A/D 변환기를 이용하여 8 Hz로 자료를 획득하였다. 선박의 자세는 선박 내 관성 항법 시스템에서 획득하는 자료를 이용하였다.
TFM으로 얻은 총자기장(total field) 자료의 경우 동일한 항차에서 얻은 자료를 사용하였다. 이 자료는 광학적으로 펌핑되는 세슘-증기 원자 공명 시스템을 사용하는 Geometrics사의 G-882 세슘 해양 견인 자력계를 사용하여 얻었다. 이 견인 센서의 경우 선박 자기장의 영향을 최소화하기 위해 선박 후방 500 m에서 견인하며 1 Hz로 자료를 획득하였다.
자료의 전처리
STCM으로 획득한 자료는 Isezaki (1986)에서 제시한 보정법을 이용하여 연구선에 의해 발생된 자기장 효과를 보정하였다. 스칼라 자력계로 얻은 자료는 측정자기장과 지자기 이상을 모두 사용하였으며 지자기이상은 국제 표준 지자기장 모델(IGRF-13, Alken et al., 2021)을 사용하여 소거해 주었다. 두 센서로 얻은 자료는 시간당 샘플링 횟수가 서로 다르기 때문에 두 자료에 0.1 km 간격으로 동일한 내삽(interpolation)을 적용하여 자료를 일치시켜주었다. STCM자료의 경우 보정 후에도 잡음성분이 매우 강하게 나타나기 때문에 다항식을 이용한 평활화(smoothing) 필터를 이용하여 잡음을 제거하였다.
스칼라와 벡터 자료를 이용한 보정
TFM으로 얻은 스칼라 총 자기장 자료는 0.01 nT이하의 오차로 정확도가 매우 높다. 반면 STCM자료는 Isezaki (1986)의 방법으로 보정을 해도 선박의 방향전환에 따른 자기장의 변화에 의한 점성자화의 영향으로 방향전환 초기 자기장의 변화가 크게 일어나지만(Lee and Kim, 2004), 이후 선박이 일정한 방향으로 이동하게 되면 선박의 유도자성에 의한 자화 벡터가 당시 위치한 지구자기장의 방향으로 천천히 변화하며 일정한 변화에 의한 선형오류가 관찰된다(Choe et al., 2021). 이러한 문제를 보완하기 위해 Choe et al. (2021)은 PPM으로 얻은 광범위한 자료와 STCM으로 얻은 자료를 총 자력이상으로 변환하여 교차점 보정을 통해 자료보정을 하였다. 하지만 이 방법은 앞서 언급한 STCM자료의 총 자력이상에서 선형 자력 오류를 효과적으로 보정할 수 있지만 벡터 삼성분의 직접적인 점성자화 보정이 불가능하다.
순항중인 선박의 이동속도는 일반적으로 20 km/h 이하로 느리게 움직이므로 선박의 정선 시점에서300 km 이하의 짧은 구간의 측선일 경우 점성자화의 영향이 약하게 나타난다(Choi et al., 2023). 하지만 측선이 길이가 길어질수록 지구자기장의 변화와 누적되는 점성자화의 영향이 점차 커지기 때문에 실제 지자기이상으로부터 수백-수천 nT의 선형오류가 발생하게 된다. 한편, 해양에서 나타나는 지자기 이상은 일반적으로 ±1500 nT이하로 관측되며 지구자기장의 세기와 선박의 점성자화성분에 비해 현저히 작게 나타난다.
동일한 지점에서 측정한 STCM으로 얻은 자료와 TFM으로 얻은 자료는 같은 세기와 같은 방향을 나타내야 한다. TFM의 경우 선박의 후방 300-500 m사이에서 관측하기 때문에 배에 의한 자성효과를 배제하고 지자기장을 측정할 수 있다. 하지만 STCM자료의 경우 앞서 언급한 점성자화의 영향으로 인해 스칼라 견인 자력계의 측정값과 큰 차이를 보인다(Fig. 2). 일반적으로 TFM의 자료보정 시 관측자료인 측정자기장의 세기에서 외핵기원의 배경자기장의 세기를 소거하여 지자기이상의 총 자력이상을 얻는다. TFM으로 측정한 총 지자기장의 세기 은 로 나타낼 수 있다. 일반적으로 우리는 외핵기원의 배경 지자기장 을 제거하여 지자기이상의 세기 를 구하게 된다(Fig. 1B). 이 방법을 다른 방법으로 표현한다면, 측정된 자기장 총합 벡터를 배경 지자기장 벡터()의 방향과 평행하게 일치시켜 소거해 주는 방법과 같다. 따라서 이러한 방법으로 얻어진 스칼라 자력이상()은 엄밀히 말하면 실제 지자기이상 벡터의 스칼라 값이 아니라 지자기이상 벡터의 배경 지자기장 방향 성분()으로 생각할 수 있다(Fig. 1B). 따라서 TFM으로 측정한 자기장 총합의 세기는 아래와 같이 표현할 수 있다.
여기서 는 지자기이상()의 IGRF방향으로의 세기를 나타낸다. 현재 우리가 가지고 있는 정보는 STCM으로 얻은 점성자화성분과 지자기이상 성분, 배경자기장 성분이 포함된 벡터 삼성분과, TFM으로 얻은 배경자기장 성분과 지자기이상이 포함된 자기장의 세기() 이다. 앞서 설명한 바와 같이 점성자화 성분은 배경자기장과 비슷한 벡터를 가지고 있고, 지자기이상의 강도는 보통 지구자기장의 1% 이내 이므로 배경자기장 벡터의 방향과 거의 일치한다고 볼 수 있다. 따라서 STCM에서 점성자화 성분을 제거하기 위해서는 STCM으로 얻은 총 자력 성분을 TFM성분으로 대체하거나, STCM에서 총 자력 성분에서 점성자화 성분을 제거해야 한다. 후자의 경우 선박의 점성자화 성분을 정확히 알아야 하지만 점성자화는 실시간으로 변하는 지자기장의 변화와 선박의 이동방향에 큰 영향을 받기 때문에 정량적인 계측이 쉽지 않다. 따라서 전자를 사용하는 것이 더 용이하다.
먼저 STCM 자료를 Isezaki (1986) 방법으로 1차 보정을 한 자기장 벡터를 [x, y, z]직교 좌표계에서 아래와 같이 정의하였다.

Fig. 1.
(A) Common geomagnetic field vectors. is Earth’s magnetic field vector generated from the outer core, is a magnetic anomaly vector, is the total field vector, summation of the and . (B) Illustration for scalar magnetic anomaly calculation. is equivalent to rotating in the direction of the vector and then subtracting it. represents the scalar strength of the total magnetic field, and represents the scalar intensity of the . To compute , we substract from the observed scalar value .
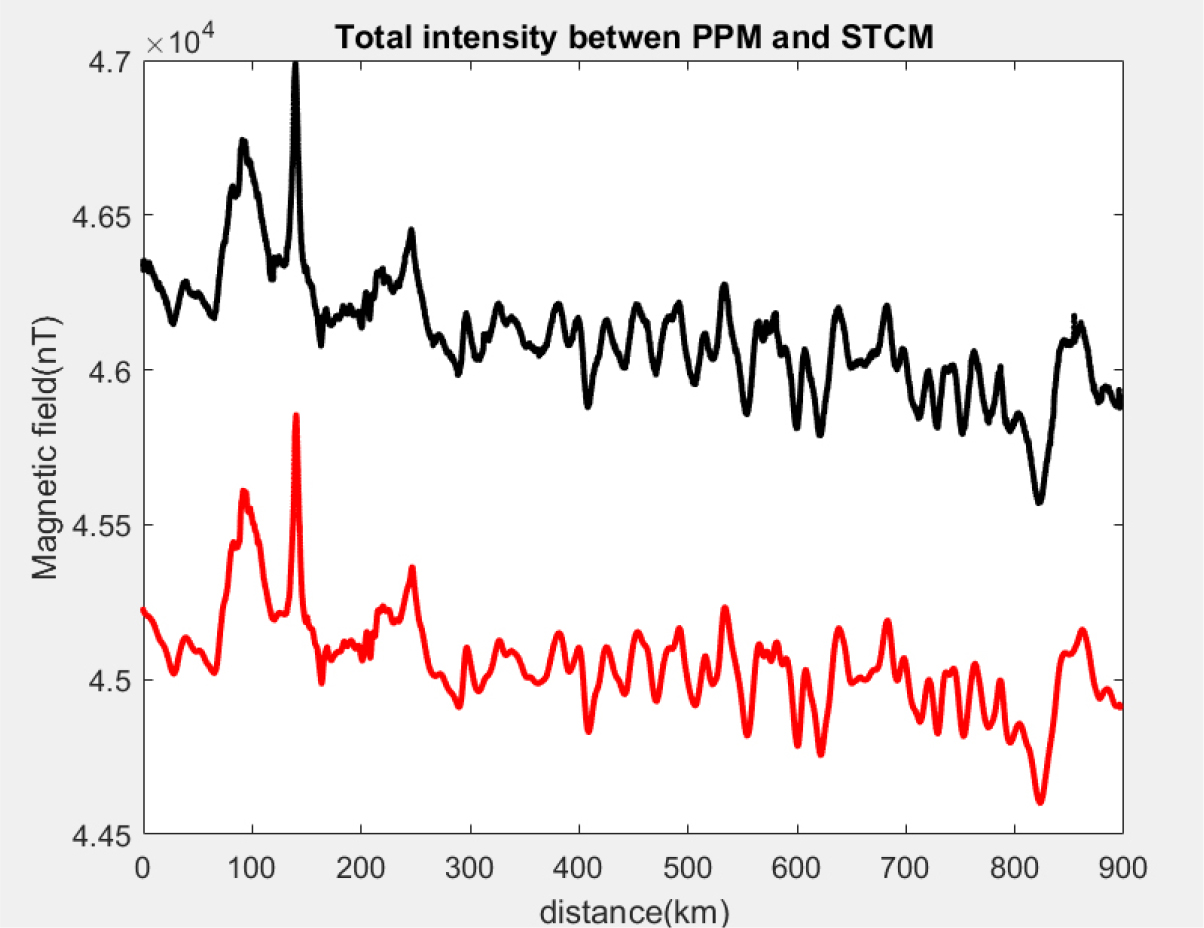
Fig. 2.
The total magnetic field from STCM data is compared to sea-surface TFM data. A black solid line represents the STCM data after Isezaki (1986) correction, while a red solid line represents the raw TFM data.
이 1차 보정된 은 여전히 외핵에 의한 자기장, 배의 점성자화에 의한 자기장, 그리고 이상체에 의한 자력의 합으로 측정되므로 아래와 같이 정의할 수 있다.
여기서 는 외핵에서 기원한 지구자기장 벡터로 로 정의하였다. 는 지자기이상 벡터, 은 선박의 점성자화에 의한 자기장변화이다. 우리는 외핵 기원 자기장()과 선박의 점성자화 벡터의 방향이 일치하다고 가정하였고 역 탄젠트 함수를 이용하여 아래와 같이 벡터의 절대각도를 구하였다.
로 각을 구했으므로 지자기에서 𝜃는 편각, 𝜙는 복각에 해당한다. 이를 이용한 회전벡터는 아래와 같이 정의하였다.
점성 자화 벡터가 당시 지구자기장 벡터()방향과 일치하다고 가정하였으므로 이를 제거하기 위해 회전행렬 R을 이용하여 지구자기장 벡터 방향을 직교 좌표계의 x축으로 회전시켜주었다(Fig. 3A, 3B, and 3C).
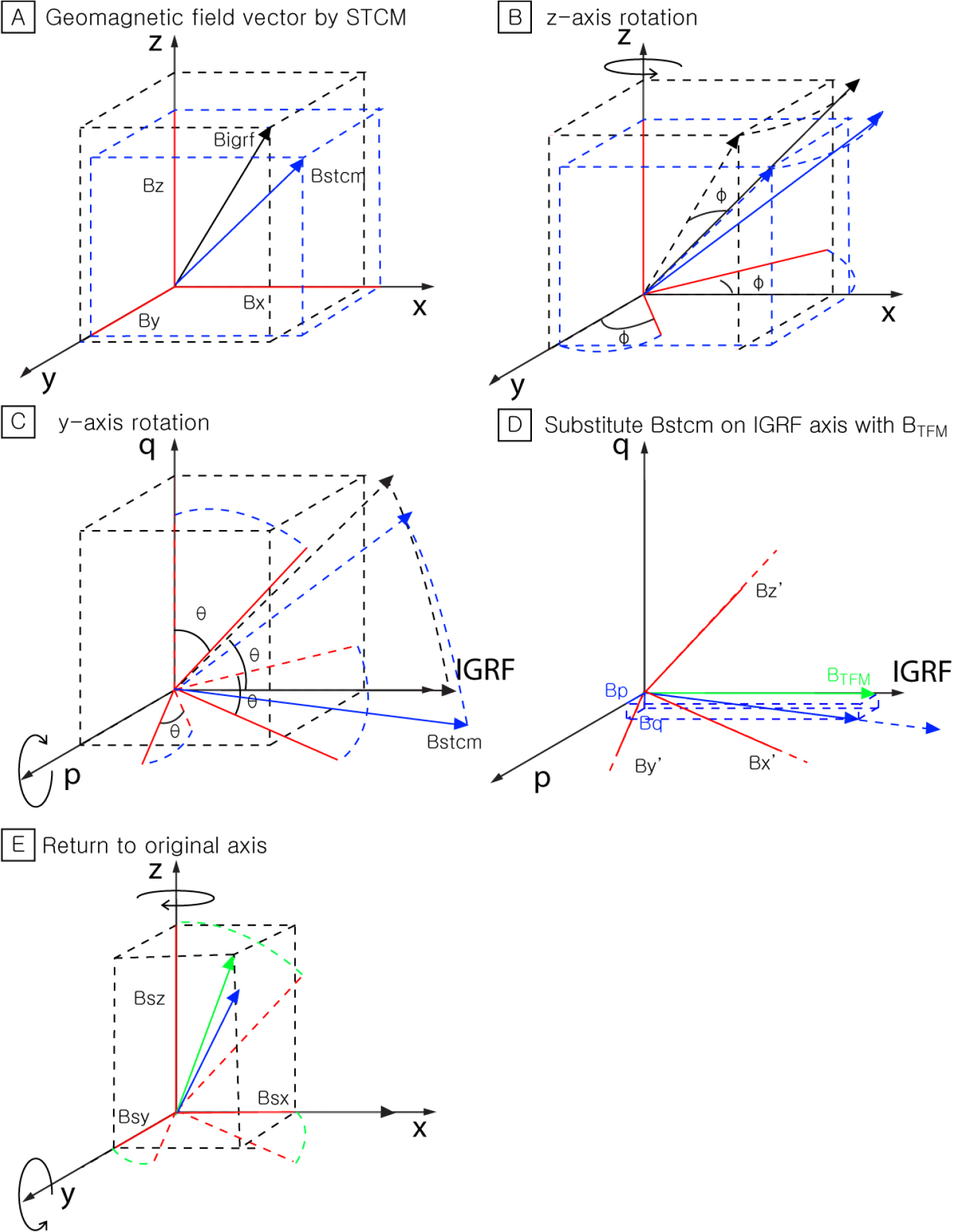
Fig. 3.
The figures show how to remove the remaining viscous magnetization from STCM data. Blue arrow indicates vector, red solid line shows vector three component of , green arrow indicates the observed TFM scalar field, green solid line describes the corrected three components of a magnetic field vector. The magnetic field vector components ([]) in Fig. 3E indicate the vector components of the TFM rotated back to ([x, y, z]) axis.
STCM으로 획득한 지자기장 총합 벡터 삼성분을 위 회전행렬R을 이용하여 직교좌표의 x축으로 회전을 위해 로 수행하면 STCM자료의 지자기장 방향이 Fig. 3C와 같이 IGRF 축(x축)과 평행하게 놓인다. 따라서 좌표의 축회전에 의한 지자기장 벡터 은 다음과 같이 다시 쓸 수 있다.
여기서 을 간단히 으로 바꿔주면 선박의 점성자화 효과인 성분을 쉽게 제거할 수 있다.
이 후, 의 지자기장 총합은 외핵 기원 지구자기장()과 지자기이상 성분()으로 구성되어 있는 과 동일해야 하기 때문에 의 축성분()을 과 교체하면 아래와 같이 표현할 수 있다(Fig. 3D).
보정된 지자기 벡터를 원래의 직교 좌표계로 다시 되돌려야 하므로 앞서 제시한 회전행렬의 역행렬을 구하여 아래와 같이 과 곱을 해줌으로써 다시 직교 좌표계로 좌표변환을 해준다(Fig. 3E).
이후 보정된 STCM 자료에서 각 성분의 지구자기장 벡터()를 소거하면 각 성분 별 지자기 이상벡터()를 구할 수 있다(Fig. 4).
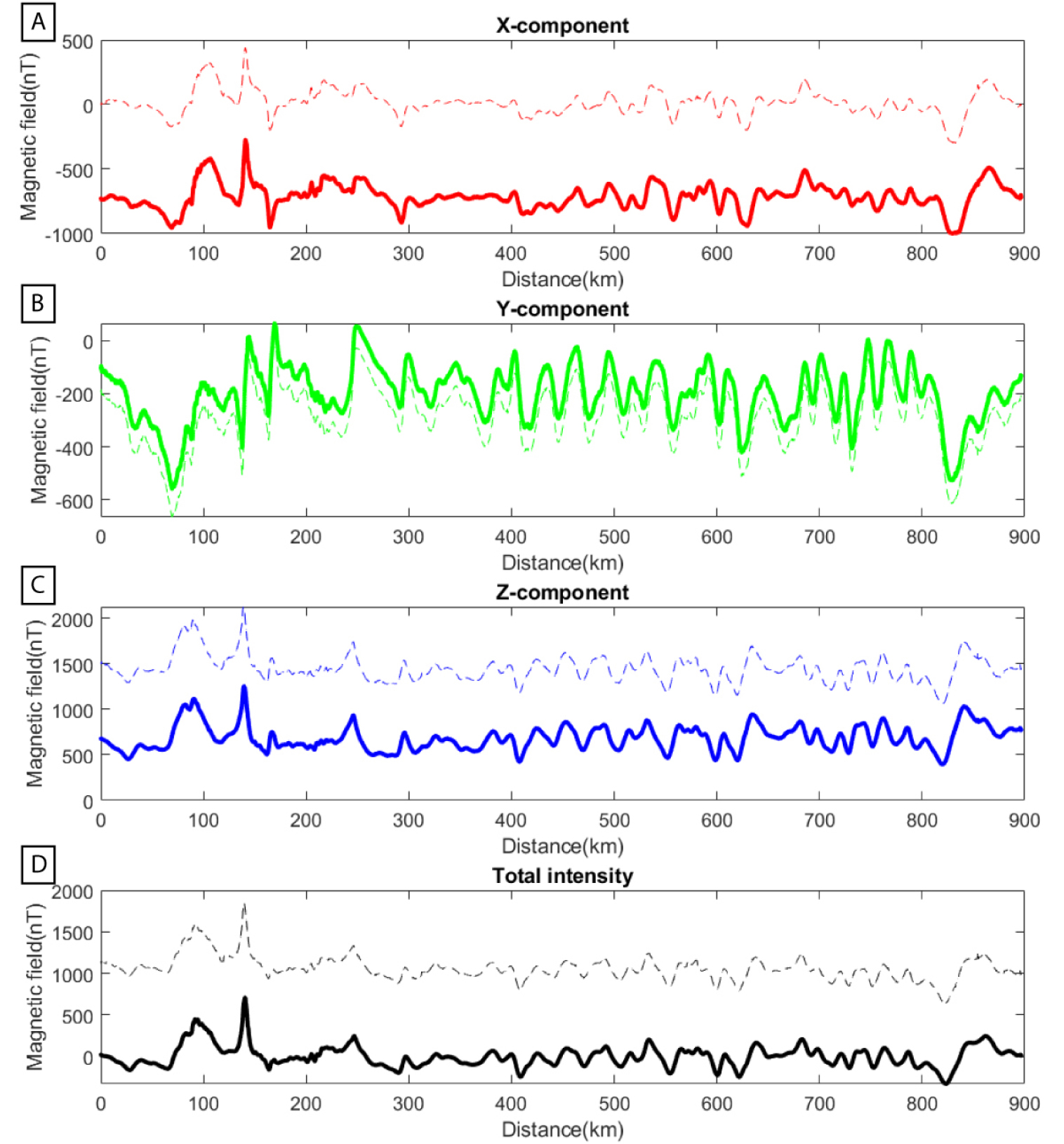
Fig. 4.
Comparisons of the STCM vector components reveal deviations of approximately 1000 nT before and after correction for viscous magnetization. (A) The x-component anomaly data. Red dashed line - before correction; Red solid line - after correction. (B) The y-component anomaly data. Green dashed line - before correction; Green solid line - after correction. (C) The z-component anomaly data. Blue dashed line - before correction; Blue solid line - after correction. (D) The total-component anomaly data. Blue dashed line - before correction; Blue solid line - after correction.
토의 및 결론
자력탐사는 매우 쉽고 빠르게 자원탐사 및 지구조 해석에 중요한 정보를 제공하고 있다. 이 연구에서 제안된 새로운 방법을 통해 자성체(연구선, 드론 등)가 자력계에 미치는 영향을 자세히 분석하고 새로운 보정법의 개발로 기존에 널리 사용하지 못하던 벡터 지자기이상 정보를 신뢰할 수 있을 정도로 보정할 수 있게 되었다. 뿐만 아니라, TFM은 지자기장의 총 세기만 측정하므로 지자기이상의 편각 및 복각을 직접적으로 알 수 없다. 따라서 지자기 왜도 분석(magnetic skewness analysis)방법을 통해 해양지각의 고위도(paleo-latitude)변화를 간접적으로 유추하는 방법을 사용하였다(Shih, 1980; Dyment et al., 1997). STCM으로 지자기장의 벡터방향을 측정할 수 있지만 기존의 보정 방법(Isezaki, 1986)은 선박의 점성자화 성분 보정이 불가하다. 또한 이번 연구를 통해 보정된 벡터 삼성분과 기존 삼성분 자기이상이 각 성분 별 200-1000 nT정도의 차이를 보이고 있어 기존의 STCM 보정법으로는 편각 및 복각 계산이 불가능하다(Fig. 4). 정확한 벡터 삼성분의 정보를 알 수 있다면 복각을 계산하여 직관적으로 위도변화 뿐만 아니라 편각 변화를 확인하여 판의 확장과정을 더욱 면밀히 분석할 수 있는 등 지자기 이상 벡터성분의 다양한 해석이 가능하다. 뿐만 아니라, 해양 자원 개발 등 여러 연구 목적의 탐사의 정확성을 크게 향상시키는데 기여할 수 있다.
STCM자료는 연구선 운항 시 자료를 상시 획득할 수 있다는 장점이 있지만 선박의 마스트 부근에 설치되어 있어 선박의 움직임, 배의 자성효과, 레이더의 간섭 등 여러 복합적인 자기벡터의 총 합이 삼성분 자력계에 기록된다. 따라서 지자기 이상대를 계산하기 위해서는 복잡한 보정방법이 필요하며, 기존의 방법을 통해 보정을 하더라도 여전히 존재하는 점성자화의 영향으로 지자기 이상 벡터의 정확한 성분을 알 수 없기 때문에 현재까지 전세계적으로 널리 사용되지 못하고 있다.
Choe et al. (2021)의 교차점 보정법을 통해 STCM자력계의 총 자력이상 성분을 보정하여 지자기이상도 제작에 사용할 수 있지만 벡터 삼성분은 여전히 보정이 불가능하다. STCM은 민감도가 PPM에 비하여 많이 떨어지고 배의 자성영향을 받아 현재까지 많이 사용되지 못하고 있다. 하지만 벡터 삼성분에 대한 정보를 획득할 수 있어 이로부터 다양한 해석을 이끌어낼 수 있는 큰 장점을 가지고 있다. 우리는 1차로 보정된 STCM자기장 벡터()를 회전시키고 이를 으로 교체하는 간단한 방법으로 효과적으로 을 제거하여 지자기 이상 벡터를 근사(approximation)하는 보정법을 제시하였다(Fig. 5). Fig. 5A의 두 그래프의 경향성(빨간색 실선, 검은색 실선)이 잘 일치하는 것을 볼 수 있다. 두 그래프의 차이를 비교해본 결과 약 7-25 nT의 범위의 오차를 확인하였다(Fig. 5A and 5B). 이 오차는 실제 지자기이상 벡터성분을 알지 못하여 이 의 벡터방향과 일치한다고 가정하고 벡터의 회전을 시켰을 때 p축과 q축에 존재하는 잔여 지자기이상벡터() 그리고 그 지자기이상벡터에 의해 영향을 받는 선박의 점성자화의 합으로 여겨진다(Fig. 3D). 하지만 지자기 이상은 전체 지자기장의 총 합에서 차지하는 비율이 1% 이하로 매우 작고, 외핵 기원의 자기장에 비해 비교적 단파장으로 수시로 변하기 때문에 선박이 일정한 방향으로 운항할 경우 지자기이상에 의한 배의 점성자화는 큰 영향을 미치지 못할 것으로 여겨진다.
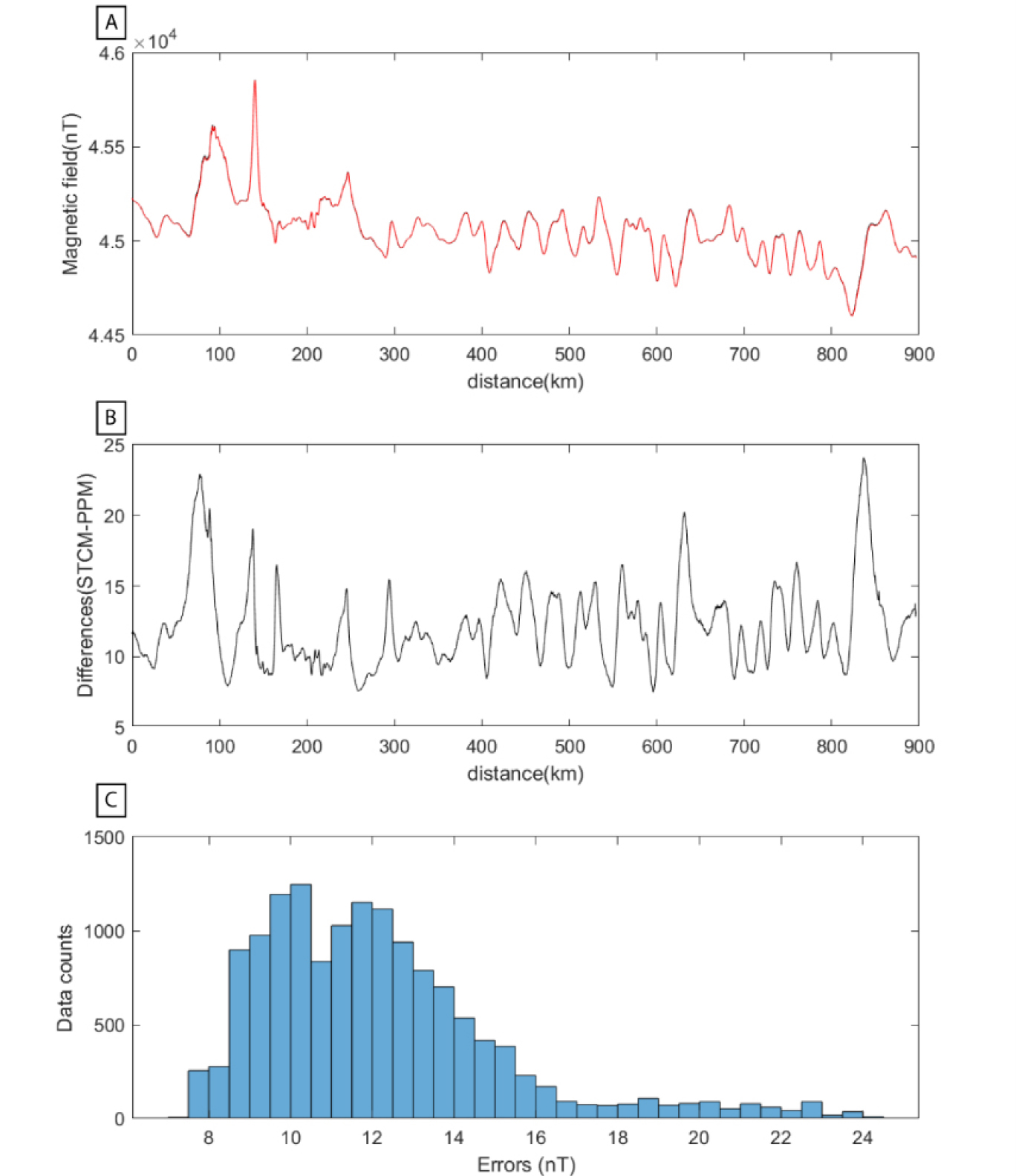
Fig. 5.
(A) The total magnetic field from STCM data, corrected for ship’s viscous magnetization, is compared to sea-surface TFM data. The black solid line describes the total component of STCM data and the red solid line shows the TFM data. Both data are well matched. (B) Differences between the two data, (C) The histogram shows errors between TFM and corrected STCM.
또한 제시된 보정법은 PPM과 STCM으로 자료를 동시에 획득되었을 경우에만 적용 가능하며, STCM의 단독 사용 시 보정이 불가능하다. 따라서 이 방법을 적용하기 위해서 STCM 과 PPM을 동시에 운영해야 한다는 단점이 있다. 연구선의 연속적인 이동에 의한 지자기장의 변화로 발생하는 유도 자화 벡터는 일시적으로 변하지 않고 선박에 유도된 유도자화는 현재 노출된 지자기장의 방향으로 자화 벡터의 방향이 서서히 변한다(Choe et al., 2021). STCM은 일반적으로 이동 항차 간 측정이 이뤄지기 때문에 점성자화에 의한 자화 벡터의 방향이 지속적으로 발생하게 되며 일반적으로 선형의 긴 파장의 특성을 보이고 있다. 이를 이용하여 지금까지 수많은 TFM으로 획득한 자료와의 교차점 보정을 활용한다면 STCM으로 단독으로 자료를 획득하더라도 벡터 삼성분 자력이상 보정이 가능할 것으로 여겨진다. 이는 선상 삼성분 자력계, 더 나아가 현재 미개척지 탐사에 활용도가 높아지고 있는 드론 자력탐사 활용률을 높이고, 탐사비용을 획기적으로 절약할 수 있어서 향후 연구가 필요한 주제로 여겨진다.
